
一文速通「机器人3D场景表示」发展史
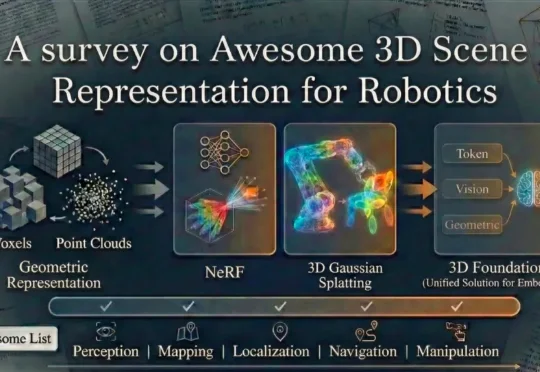
一文速通「机器人3D场景表示」发展史上海交通大学、波恩大学等院校的研究团队全面总结了当前机器人技术中常用的场景表示方法。这些方法包括传统的点云、体素栅格、符号距离函数以及场景图等传统几何表示方式,同时也涵盖了最新的神经网络表示技术,如神经辐射场、3D 高斯散布模型以及新兴的 3D 基础模型。
来自主题: AI技术研报
7407 点击 2026-01-24 10:31
上海交通大学、波恩大学等院校的研究团队全面总结了当前机器人技术中常用的场景表示方法。这些方法包括传统的点云、体素栅格、符号距离函数以及场景图等传统几何表示方式,同时也涵盖了最新的神经网络表示技术,如神经辐射场、3D 高斯散布模型以及新兴的 3D 基础模型。
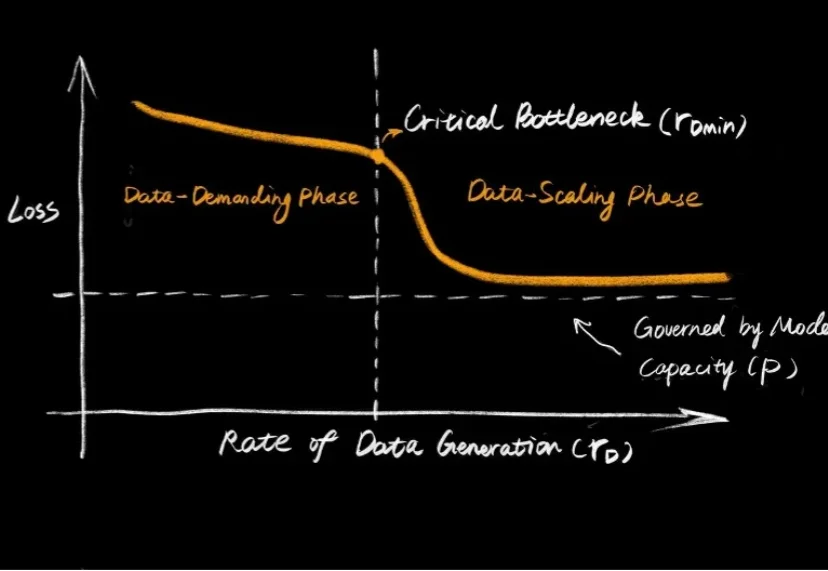
大语言模型的爆发,让大家见证了 Scaling Law 的威力:只要数据够多、算力够猛,智能似乎就会自动涌现。但在机器人领域,这个公式似乎失效了。
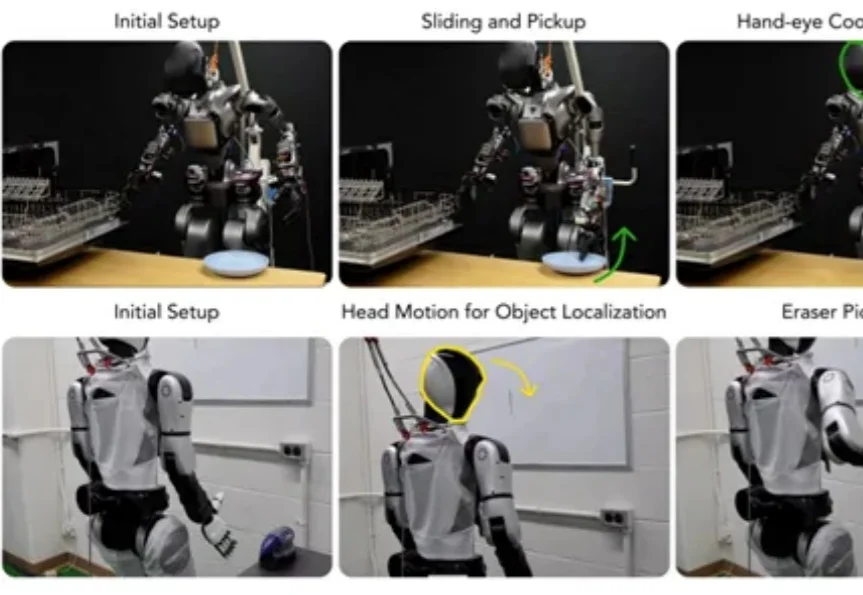
在家庭厨房自主使用洗碗机,在办公室边移动边擦拭白板——这些人类习以为常的场景,对人形机器人来说,却是需要调动全身关节协同运作才能完成的“高难度挑战”。

今日,美国机器人初创公司Skild AI宣布完成约14亿美元(约合人民币97.6亿元)的C轮融资,估值升至超140亿美元(约合人民币976.3亿元),达到7个月前的3倍。
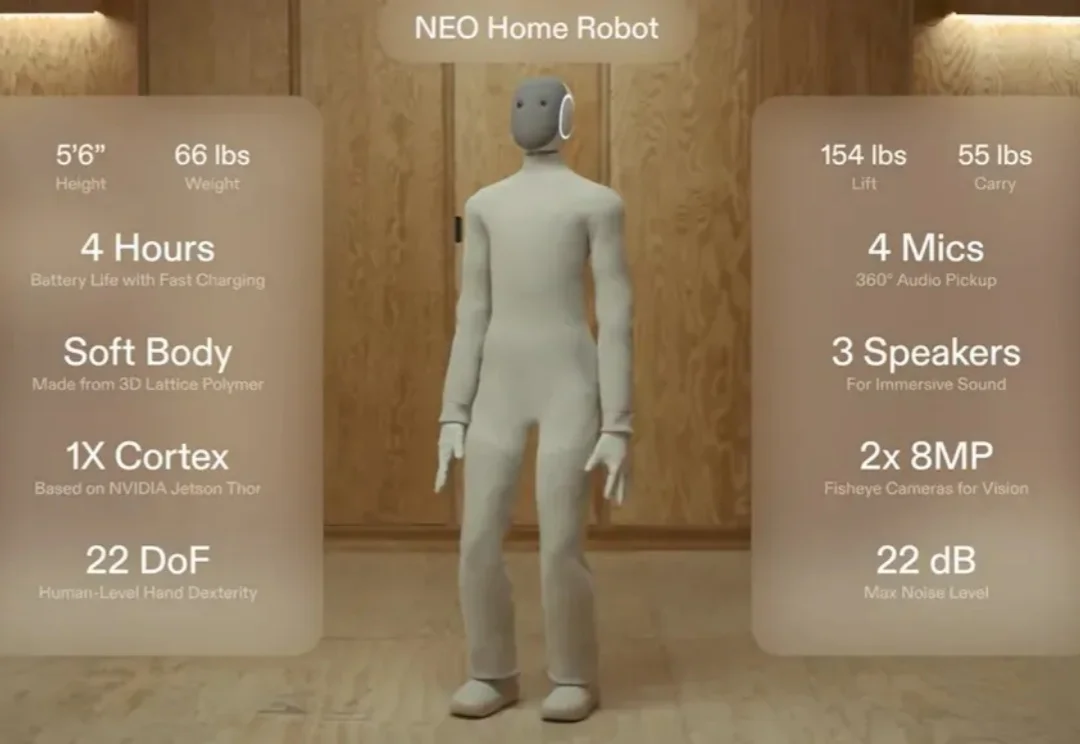
还记得那个穿着「Lululemon」紧身衣、主打温柔陪伴的家用人形机器人 NEO 吗?
这两年,电子宠物又火了。
允中 发自 凹非寺 量子位 | 公众号 QbitAI 如果你对人形机器人的印象,还停留在——走两步就摔、抓东西像戴着拳击手套、干活前得先写一堆脚本…… 那么MATRIX-3的出现,可能要强行带你“翻篇
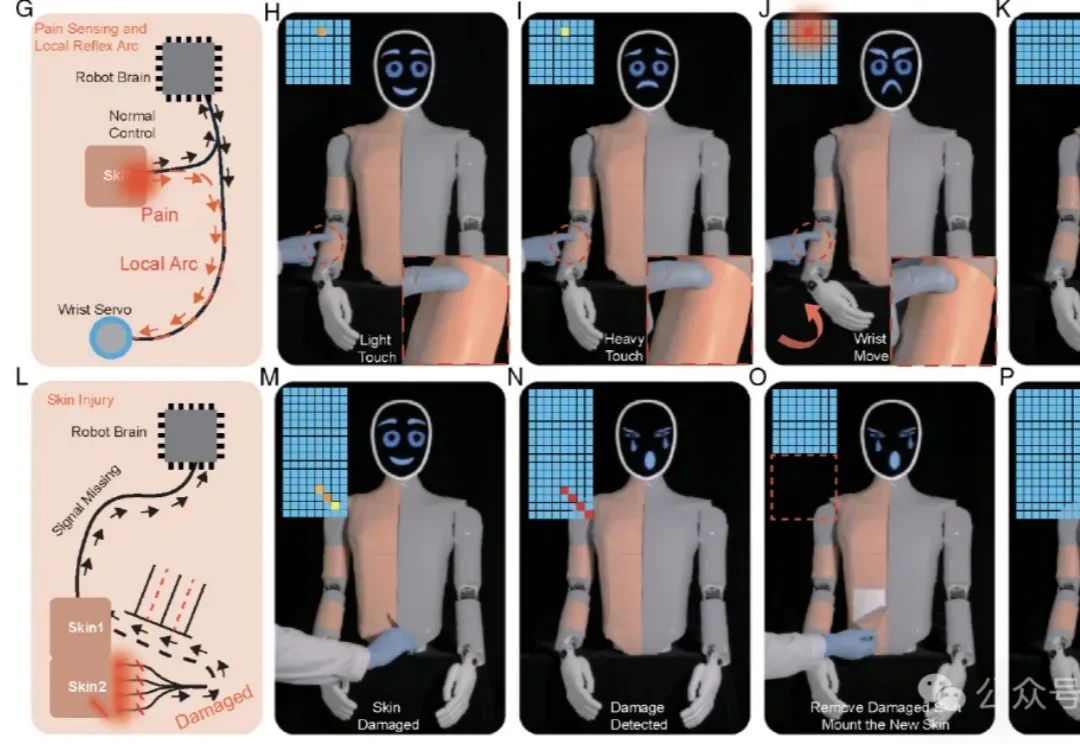
这下,你打人形机器人,它真的会「疼」了。
天使轮融资破纪录后,它石智航首次完整披露他们的“具身方法论”。

2026年,人形机器人将迎来规模化量产的元年。最清晰的信号来自特斯拉,“金色擎天柱”Optimus Gen 3预计在2026年第一季度亮相,并计划在年底前建成产能高达100万台的生产线。马斯克曾多次表示,特斯拉未来约80%的价值来自这里,而非汽车。而“擎天柱”的攻关关键,正在于它的“手与前臂”。