
ICLR 2026|滑铁卢大学联合可灵提出UniVideo:统一视频理解、生成、编辑多模态
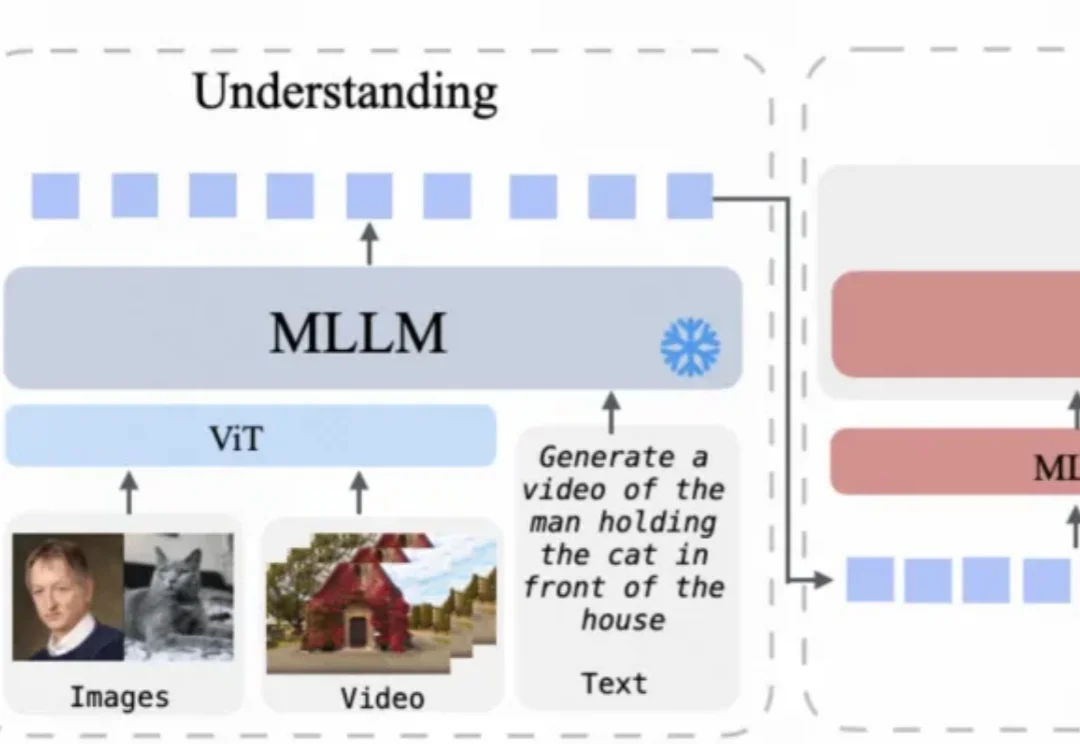
ICLR 2026|滑铁卢大学联合可灵提出UniVideo:统一视频理解、生成、编辑多模态统一多模态模型在多模态内容理解与生成方面已展现出良好效果,但目前仍主要局限于图像领域。
来自主题: AI技术研报
7244 点击 2026-03-06 09:31
统一多模态模型在多模态内容理解与生成方面已展现出良好效果,但目前仍主要局限于图像领域。

长期以来,计算机视觉领域陷入了一个 “表征(Representation)” 的执念。我们习惯设计各种精巧的 Encoder,试图将动态世界压缩成一组特征向量。然而,视频作为现实的高维投影,其熵值之高、动态之复杂,让这种试图 “定格” 的表征显得力不从心。

全新的具身模型空间能力评估范式 Theory of Space 突破了传统静态图文问答的局限,系统性地考察基础模型能否像人一样,在部分可观测的动态环境中,通过自主探索来构建、修正和利用空间信念。该论文已被 ICLR 2026 接收。
你见过 7B 模型在拼图推理上干翻 GPT-5 吗?
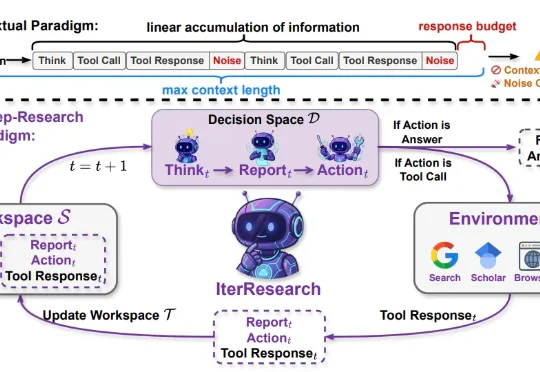
来自中国人民大学与阿里巴巴通义实验室的研究团队提出了 IterResearch,一种全新的迭代式深度研究范式。通过马尔可夫式的工作空间重构,IterResearch 让 Agent 在仅 40K 上下文长度下完成了 2048 次工具交互且性能不衰减,在 BrowseComp 上从 3.5% 一路攀升至 42.5%。
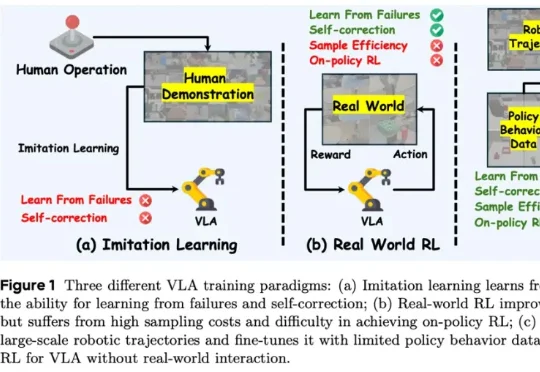
香港科技大学 PEI-Lab 与字节跳动 Seed 团队近期提出的 WMPO(World Model-based Policy Optimization),正是这样一种让具身智能在 “想象中训练” 的新范式。该方法无需在真实机器人上进行大规模强化学习交互,却能显著提升策略性能,甚至涌现出 自我纠错(Self-correction) 行为。
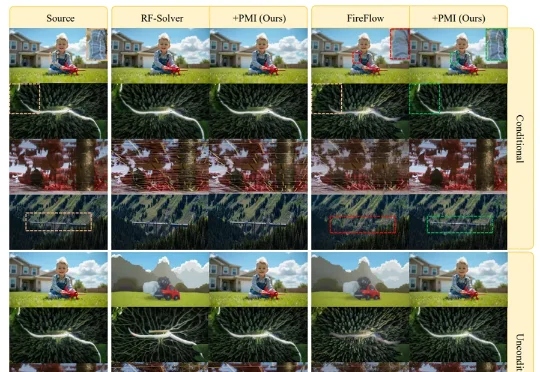
现有Rectified Flow(RF)模型在反演阶段面临的核心挑战,是逆向ODE对微小误差高度敏感,容易沿着数值不稳定方向偏离前向流形,导致轨迹发散、重建不一致、编辑不可控。为解决这一问题,团队提出PMI(Prox-Mean-Inversion),一种针对RF反演稳定性的轻量化修正机制。
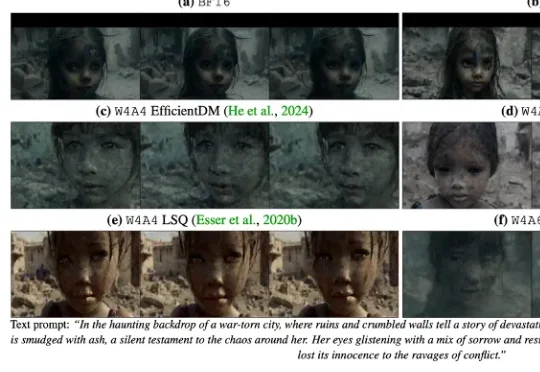
香港科技大学 & 北航 & 商汤等提出了一个专门面向视频生成扩散模型的 QAT 范式 ——QVGen,在 3-bit / 4-bit 都能把质量拉回来,并且让 4-bit 首次接近全精度表现成为现实。该论文现已被 ICLR 高分接收:rebuttal 前 88666(top 1.4%),rebuttal 后 88886 (top 0.5%)。
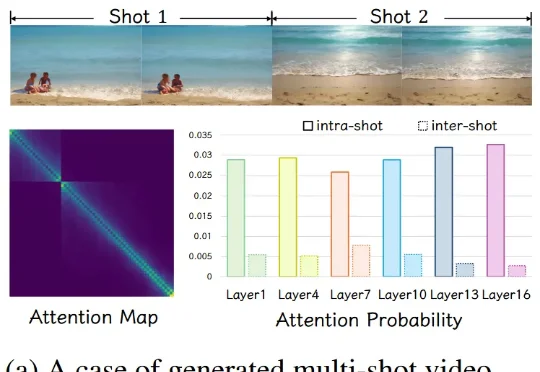
基于对注意力特性的观察,CineTrans 提出块对角掩码的通用机制,使视频生成模型能高效地自动化转场。为了进一步提升转场模型的效果和准确性,作者设计了详细的多镜头视频生产管线,并收集了一个高质量、多镜头数据集 Cine250K,大幅提升多镜头转场视频生成的效果。作为首个时间级可控的自动化转场模型,CineTrans 为这一领域的众多后续方法提供了关键技术。
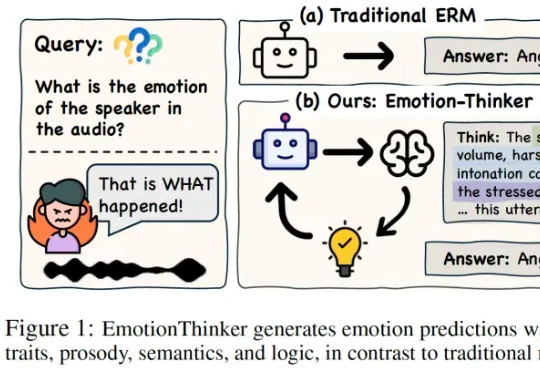
SpeechLLM 是否具备像人类一样解释 “为什么” 做出情绪判断的能力?为此,研究团队提出了EmotionThinker—— 首个面向可解释情感推理(Explainable Emotion Reasoning)的强化学习框架,尝试将 SER 从 “分类任务” 提升为 “多模态证据驱动的推理任务”。