JustGRPO:扩散语言模型的极简主义回归
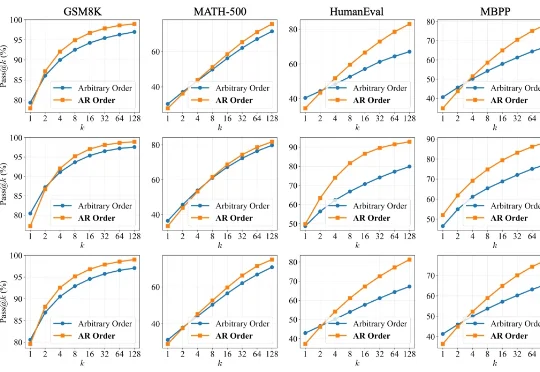
JustGRPO:扩散语言模型的极简主义回归扩散语言模型(Diffusion LLMs, dLLMs)因支持「任意顺序生成」和并行解码而备受瞩目。直觉上,打破传统自回归(AR)「从左到右」的束缚,理应赋予模型更广阔的解空间,从而在数学、代码等复杂任务上解锁更强的推理潜力。
来自主题: AI技术研报
11004 点击 2026-01-29 14:55
 搜索
搜索
扩散语言模型(Diffusion LLMs, dLLMs)因支持「任意顺序生成」和并行解码而备受瞩目。直觉上,打破传统自回归(AR)「从左到右」的束缚,理应赋予模型更广阔的解空间,从而在数学、代码等复杂任务上解锁更强的推理潜力。
为什么在LLM推理能力大幅跃升的2026,我们依然只有AI Copilot而没有AI Teammate?尽管AI编程工具遍地开花,但不管是Claude Code还是Codex,本质上仍是“单Agent开发”或“主从控制”架构。而“AI结对编程”迟迟无法落地?
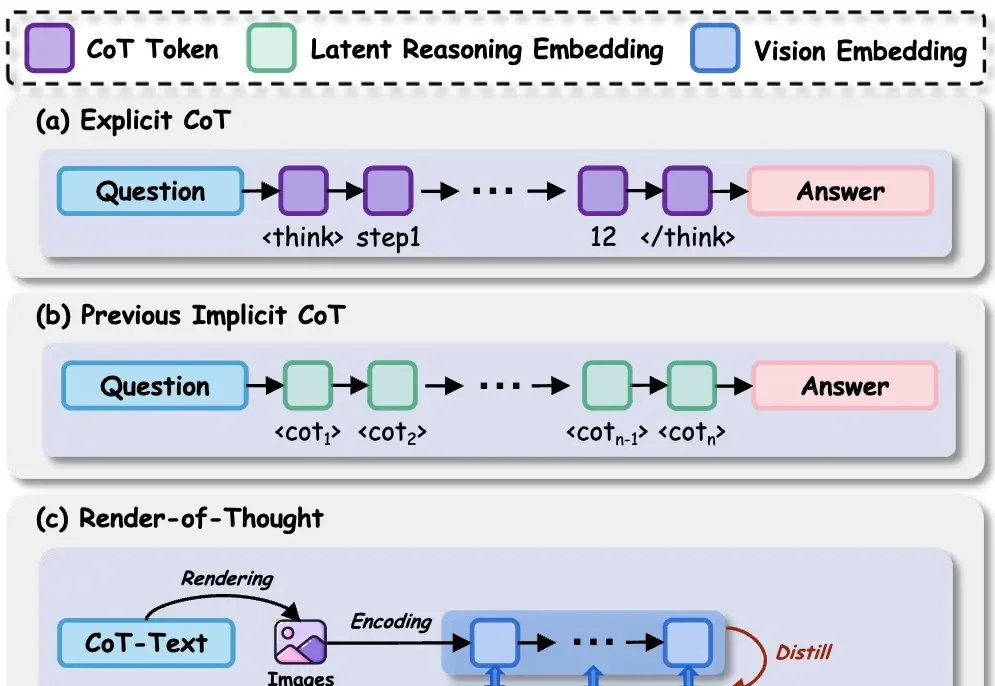
在 LLM 时代,思维链( CoT)已成为解锁模型复杂推理能力的关键钥匙。然而,CoT 的冗长问题一直困扰着研究者——中间推理步骤和解码操作带来了巨大的计算开销和显存占用,严重制约了模型的推理效率。
大模型推理的基石 vLLM,现在成为创业公司了。
大模型竞赛中,算力不再只是堆显卡,更是抢效率。
GEM框架利用认知科学原理,从少量人类偏好中提取多维认知评估,让AI在极少标注下精准理解人类思维,提高了数据效率,在医疗等专业领域表现优异,为AI与人类偏好对齐提供新思路。

目前已经出现了一些早期迹象,通用LLM助手领域的市场格局,正朝着“赢家通吃”,至少是“赢家通吃大部分市场”的趋势发展。在ChatGPT、Gemini、Claude 3和Cursor这几款产品中,仅有9%的用户会为一款以上的产品付费。

不讲武德!游戏圈这回真是被AI抄家了。(doge)
2025 年 1 月 20 日,DeepSeek(深度求索)正式发布了 DeepSeek-R1 模型,并由此开启了新的开源 LLM 时代。在 Hugging Face 刚刚发布的《「DeepSeek 时刻」一周年记》博客中,DeepSeek-R1 也是该平台上获赞最多的模型。

最新综述首次系统探讨LLM控制机器人的安全威胁、防御机制与未来挑战,指出LLM的具身鸿沟导致其在物理空间可能执行危险动作,而现有防御体系存在逻辑与物理脱节等问题。