化解机器人的「幻觉」:北大发布OmniManip,VLM结合双闭环系统,3D理解能力大幅提升
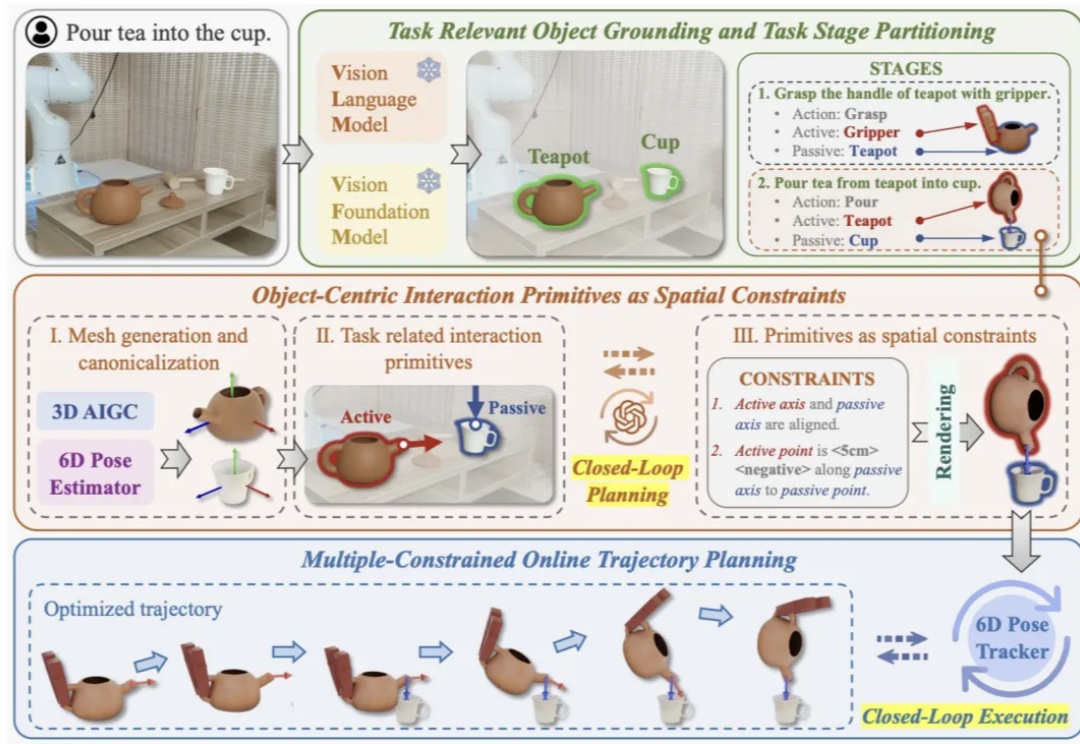
化解机器人的「幻觉」:北大发布OmniManip,VLM结合双闭环系统,3D理解能力大幅提升近年来视觉语⾔基础模型(Vision Language Models, VLMs)在多模态理解和⾼层次常识推理上⼤放异彩,如何将其应⽤于机器⼈以实现通⽤操作是具身智能领域的⼀个核⼼问题。这⼀⽬标的实现受两⼤关键挑战制约:
来自主题: AI技术研报
9413 点击 2025-01-23 13:09
 搜索
搜索
近年来视觉语⾔基础模型(Vision Language Models, VLMs)在多模态理解和⾼层次常识推理上⼤放异彩,如何将其应⽤于机器⼈以实现通⽤操作是具身智能领域的⼀个核⼼问题。这⼀⽬标的实现受两⼤关键挑战制约:

2024年,智元机器人与北大成立联合实验室,8月发布“远征”与“灵犀”两大系列共五款商用人形机器人新品,10月旗下灵犀X1人形机器人官宣开源,12月宣布正式开启通用机器人量产,不断拓展应用场景。