
Z Tech|对话童晟邦:师从LeCun与谢赛宁,视觉大模型的下一站是World Model
Z Tech|对话童晟邦:师从LeCun与谢赛宁,视觉大模型的下一站是World Model即将结束博士生涯的童晟邦,正站在另一个起点上。
来自主题: AI资讯
7452 点击 2026-05-25 15:10
 搜索
搜索
即将结束博士生涯的童晟邦,正站在另一个起点上。

刚刚完成新一轮亿元融资的具脑磐石,从成立之初押注的正是这个方向。具脑磐石由朱森华创立。他曾任华为云AI算法创新Lab主任,主导过AI脑科学云平台、盘古具身大模型、全球具身智能产业创新中心等系统级项目。在业内,他被称为“华为具身大脑一号位”。

Bloomberg曝光的一份xAI内部组织架构图显示,19人的管理、产品、工程三层架构里,几乎全是马斯克的老部下:SpaceX总裁、Starlink五年老兵、家族办公室总管、Tesla AI工程负责人逐一就位。
Jim Fan 押注的这条 “先预测世界,再生成动作” 的新路,正是当下具身智能领域最炙手可热的下一代范式 —— 世界动作模型(World Action Models,简称 WAM)。虽然 WAM 正在迅速成为各大顶尖实验室的核心发力点,但业界至今仍然缺乏对它的统一标准和系统梳理。近期,复旦大学可信具身智能研究院,上海创智学院,新加坡国立大学发表了首篇 WAM 的详细综述。

姜旭是少数完整参与过 OpenAI 大模型核心技术演进的华人创业者之一。2019 至 2023 年间,他经历了 GPT 系列能力爆发最关键的阶段,工作横跨底层训练 infra、大规模预训练、RLHF 对齐算法与数据构建等核心链路。
2026 年,世界动作模型(WAM)在具身智能领域逐渐成为一个集中讨论的方向,英伟达等公司也陆续在这一领域投入资源。
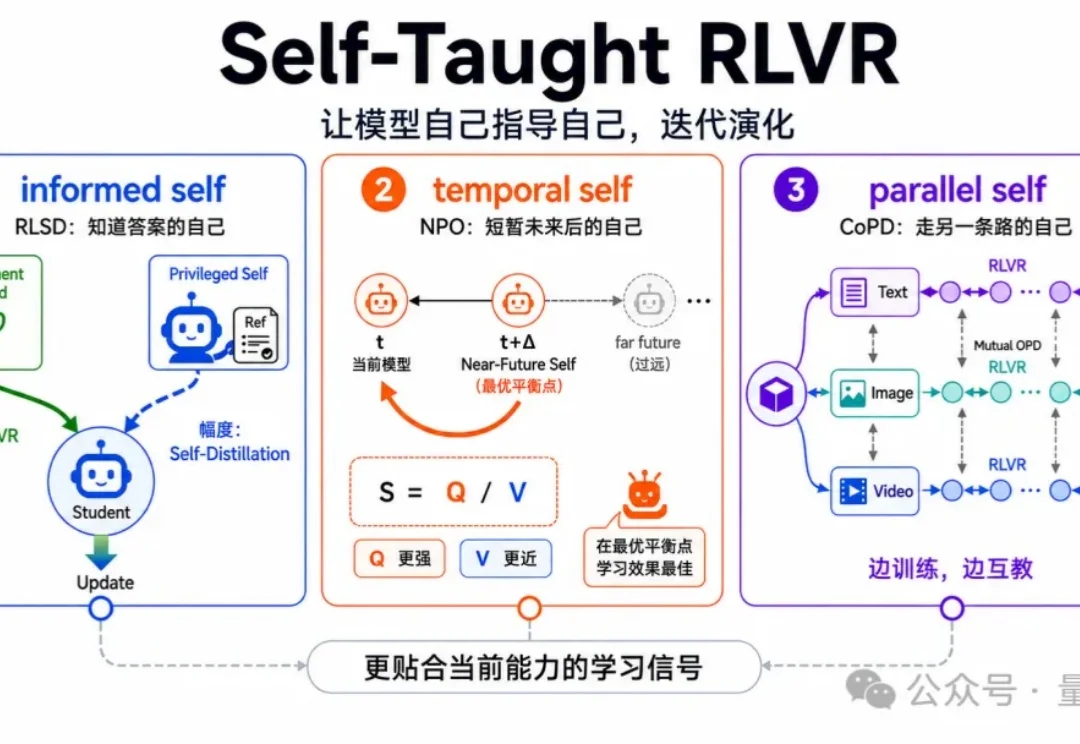
最近,京东和中科院信工所展开了Self-Taught RLVR的系列研究,并连发三篇后训练新作。

2026 年 5 月,深度机智(DeepCybo)迎来成立一周年。
世界模型(World Model),想必你已经在很多场合听过这个术语了。它有时出现在视频生成领域,有时又出现在具身智能领域;它们的含义还有所差别,甚至看起来像是完全不同的概念。
最近,全球的网民都化身「监工」,围观了 Figure AI 的人形机器人直播在物流传送带上连续几十个小时,不间断地分拣包裹。