这个Skill让AI突破了反爬虫检测,最后一块短板补上了
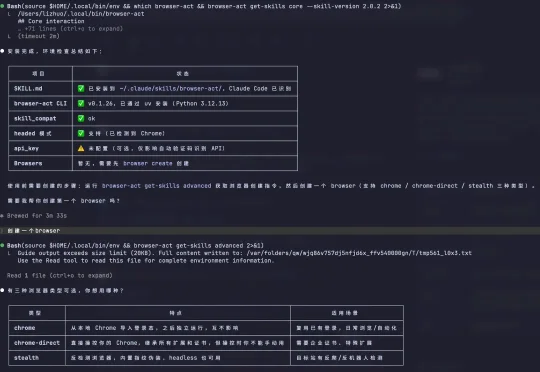
这个Skill让AI突破了反爬虫检测,最后一块短板补上了如何让 Agent 把浏览器用得更 6,一直是一个还没有完美解答的课题。周末躺床上刷 GitHub trending,看到一个项目名字叫 BrowserAct。简介写着:AI Agent 操作真实浏览器。
来自主题: AI资讯
10767 点击 2026-06-11 00:44
 搜索
搜索
如何让 Agent 把浏览器用得更 6,一直是一个还没有完美解答的课题。周末躺床上刷 GitHub trending,看到一个项目名字叫 BrowserAct。简介写着:AI Agent 操作真实浏览器。
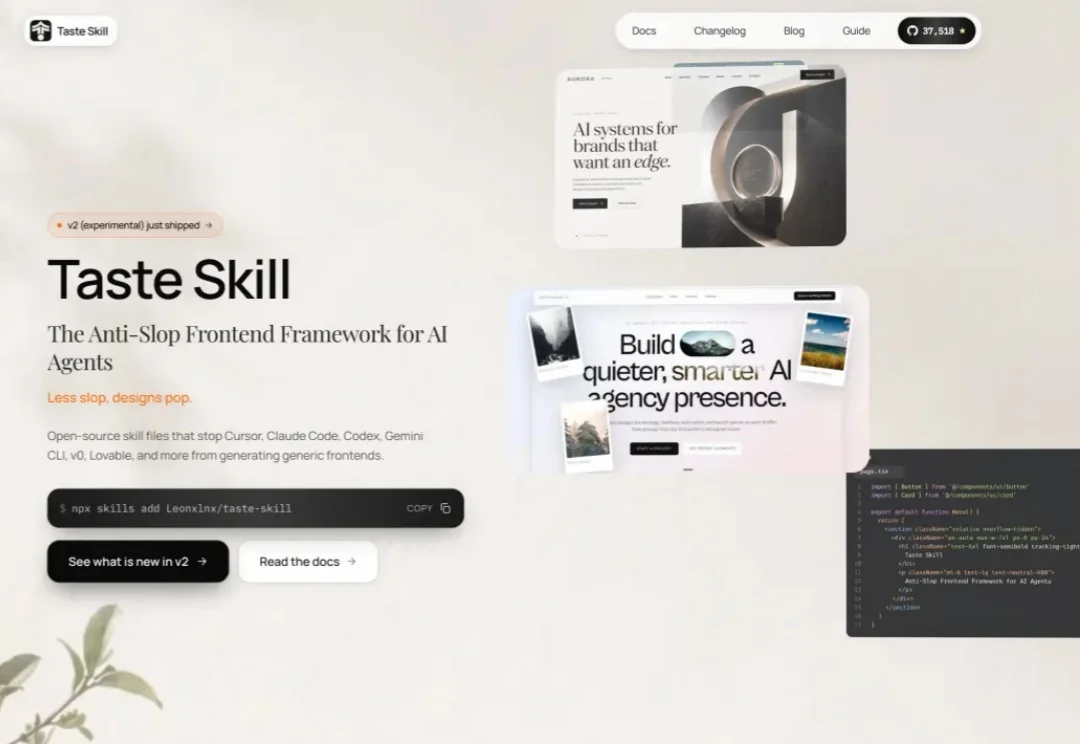
最近一个月,一个开源项目一直阴魂不散地出现在我的脑海里,每当我用AI写前端代码的时候就会自动想到它。
训练大模型时,工程师绝对不会指望网络做一次前向传播就能收敛。它需要数据喂养、Batch切分、学习率控制、验证集筛选以及优化器状态的迭代试错。

6月3日,千问APP宣布向第三方Agent和Skill全面开放。未来,企业可以在千问中运营自己的品牌Agent。目前,瑞幸、肯德基、蜜雪冰城、东方航空等首批企业已启动测试,并将陆续上线。
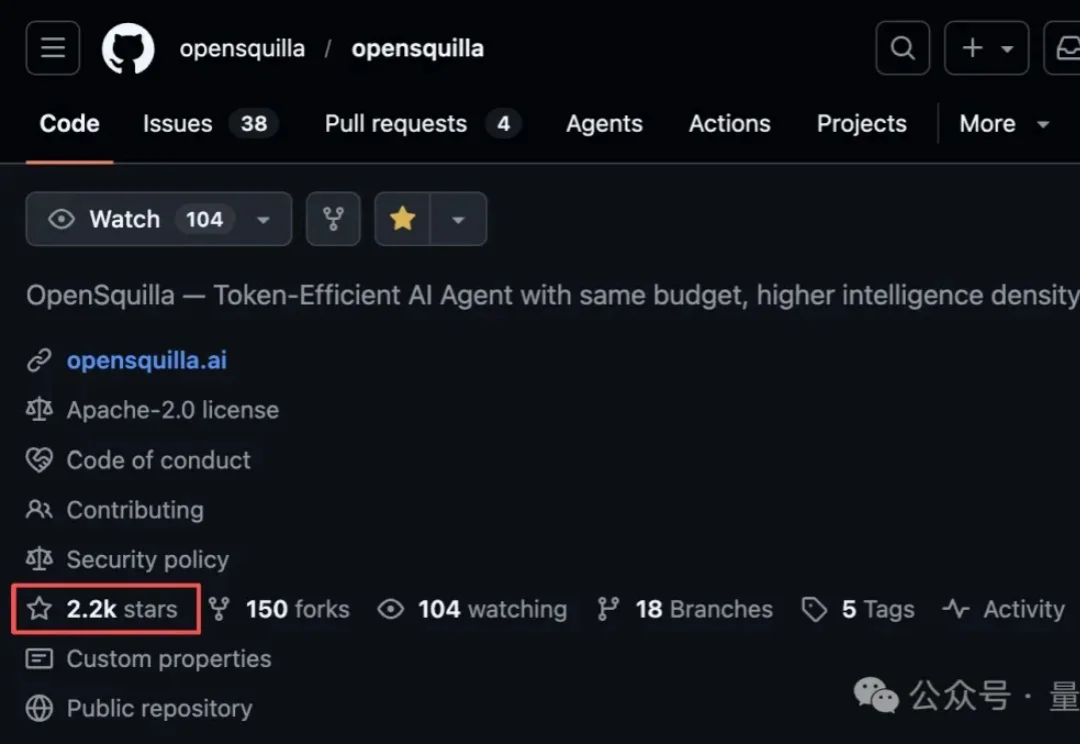
GitHub最新火爆仓库:OpenSquilla。
现在Agent太多了, Skill合集,Agent社区,多Agent,云端和本地Agent结合这四件套都快成标配了。
这两天干了一个我觉得还挺有意思的事,虽然很小,但是我也想写下来,因为感觉它可以非常非常直观的让大家感受到。

前两天我在做一个产品定价方案,问 Claude Code 有什么思路。
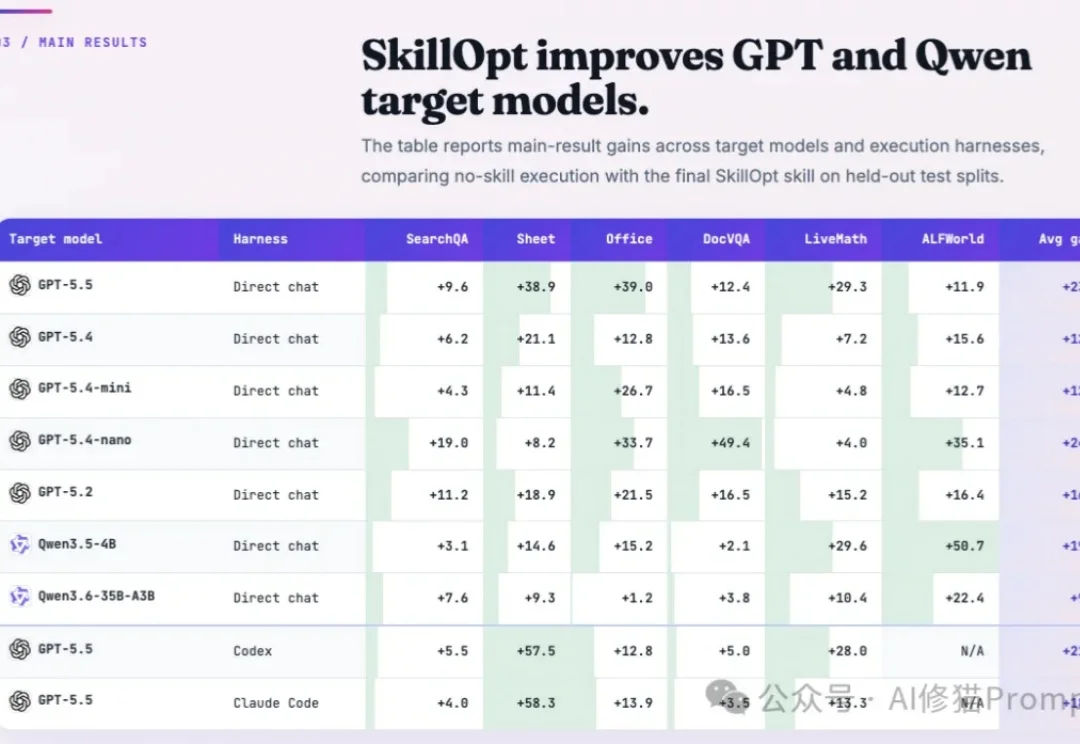
从大模型的提示词到智能体的 Skills,看着进化了,但又没有完全进化。
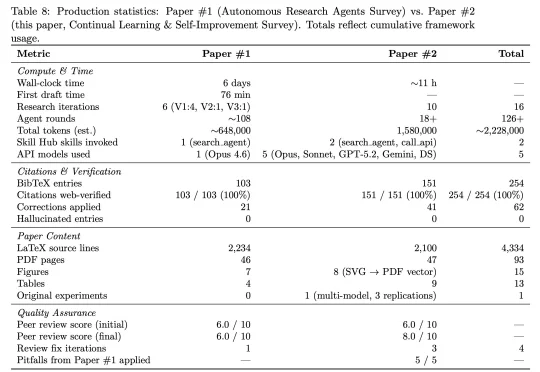
DeepSeek 研究员陈德里(Deli Chen)和 AI 合作的第二篇论文来了!论文地址:https://victorchen96.github.io/continual_learning_survey.pdf这篇论文聚焦 continual learning(持续学习) 与 self-iteration(自我迭代)。在陈德里看来,这是 AI 迈向 AGI 过程中极为关键的一步。