τ0-WM:最大规模预训练的开源具身世界模型来了
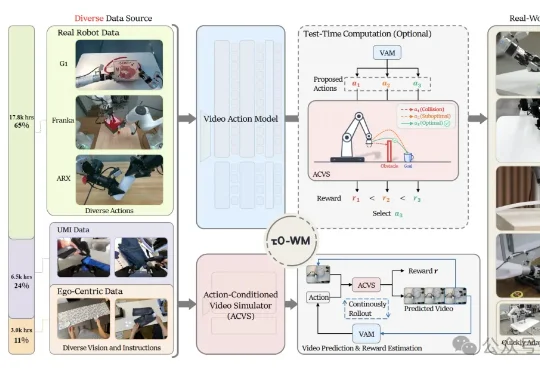
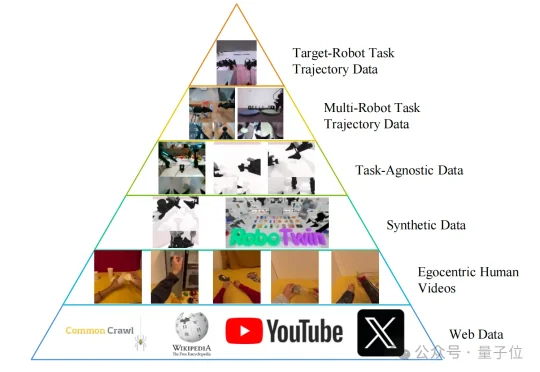
τ0-WM:最大规模预训练的开源具身世界模型来了刚刚,上海创智学院副教授、智元机器人首席科学家罗剑岚带队,发布全球最大规模的开源预训练具身世界模型——τ0-World Model(τ0-WM)。整个τ0-WM参数量达到5B,预训练数据规模高达约3万小时。其中,真机遥操作数据第一次成了绝对主力,占到了1.78万小时。
来自主题: AI技术研报
9025 点击 2026-05-31 19:39
 搜索
搜索
刚刚,上海创智学院副教授、智元机器人首席科学家罗剑岚带队,发布全球最大规模的开源预训练具身世界模型——τ0-World Model(τ0-WM)。整个τ0-WM参数量达到5B,预训练数据规模高达约3万小时。其中,真机遥操作数据第一次成了绝对主力,占到了1.78万小时。
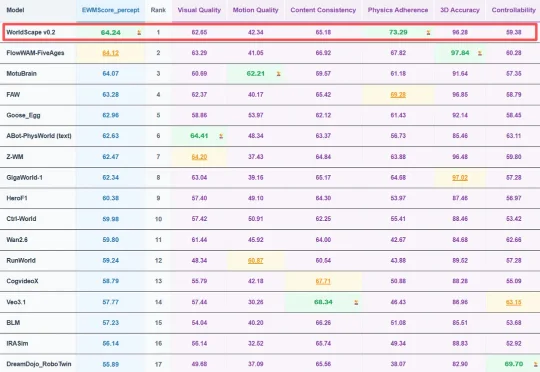
近日,全球具身世界模型权威基准评测 WorldArena 正式更新最新榜单。Manifold AI 流形空间研发的世界模型 WorldScape 0.2,凭借其在物理规律遵循与多源交互理解上的突破取得 WorldArena 榜单全球第一,充分展现了国产世界模型在复杂动态场景生成与具身控制中的高精度、强泛化与物理可信度。与其同场竞技的包括英伟达、谷歌等国外巨头和星动纪元、极佳视界等国内具身智能公司。
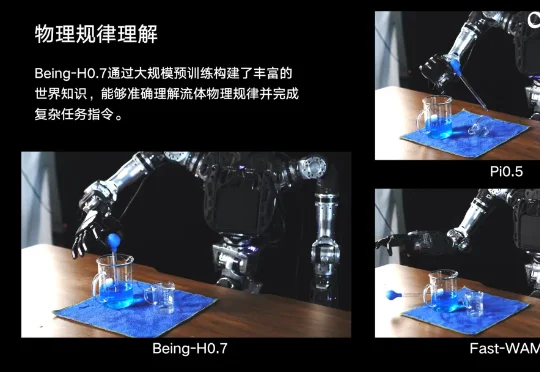
4 月 14 日,智在无界发布第三代旗舰模型 Being-H0.7,该模型将数据规模扩展至 20 万小时人类视频,并提出一种全新的范式 —— 基于潜空间推理的世界模型。在 6 项国际性权威评测中,H0.7 综合排名全球第一(其中 4 项登顶),同时也是首个覆盖跨本体、跨场景、连续动态、流体、柔性物体、物理规律与上下文推理等七大关键维度的通用世界模型。
通用世界模型评测榜单 WorldScore 登顶、建立具身世界模型评测榜单 WorldArena 、发布通用世界模型 WorldScape 、发布世界-动作模型 WorldScape Policy,这家低调的世界模型创业公司 Manifold AI(流形空间)近期走出隐身模式频频出手,开始领跑世界-动作模型具身新路线。
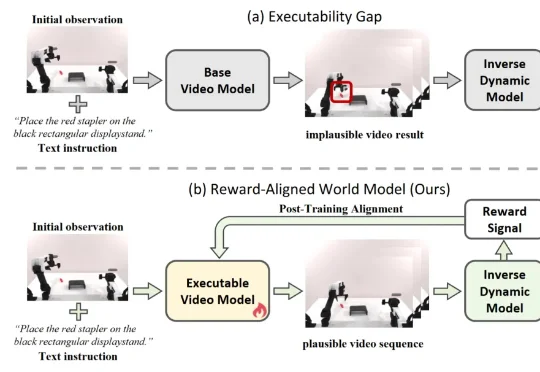
近期,利用视频生成模型为机器人构建 “世界模型”,已成为具身智能领域的热门技术路线。给定当前观测和自然语言指令,这类模型能够先 “想象” 出未来的视觉轨迹,再由逆动力学模型(IDM)将生成画面解码为机器人动作,从而形成 “先预测、后执行” 的解耦式规划范式。由于兼具较强的可解释性与开放场景泛化潜力,这一路线正在受到学术界和工业界的广泛关注。

医疗AI终于走出了「只会聊天」的舒适区。今天,斯坦福与普林斯顿联手NVIDIA发布MedOS。这不是一个单纯的手术机器人,而是全球首个通用医疗具身世界模型。从临床诊断到治疗,从外科手术到药物研发,MedOS正在让AI真正读懂「生老病死」的物理现实。
国产开源具身世界模型,直接秒了Pi-0.5,而且还是几位清华硕、博士研究生领衔推出的。这就是由生数科技联合清华大学,正式开源的大一统世界模型——Motus。
在「具身智能」与「世界模型」成为新一轮 AI 竞赛关键词的当下,来自北京人形机器人创新中心、北京大学多媒体信息处理国家重点实验室、香港科技大学的中国团队开源了全新的世界模型架构。
近年来,随着人工智能从感知智能向决策智能演进,世界模型 (World Models)逐渐成为机器人领域的重要研究方向。世界模型旨在让智能体对环境进行建模并预测未来状态,从而实现更高效的规划与决策。
TeleAI 李学龙团队提出具身世界模型,挖掘大量人类操作视频和少量机器人数据的共同决策模式。