
WAIC最狠展台打爆工业「深水区」!它石智航首发具身原生大脑AWE 3.5,具身Scaling全面释放
WAIC最狠展台打爆工业「深水区」!它石智航首发具身原生大脑AWE 3.5,具身Scaling全面释放走进一家大型汽车制造商的线束车间,你会看到和整车工厂截然不同的画面。
来自主题: AI资讯
8569 点击 2026-07-23 10:40
 搜索
搜索
走进一家大型汽车制造商的线束车间,你会看到和整车工厂截然不同的画面。
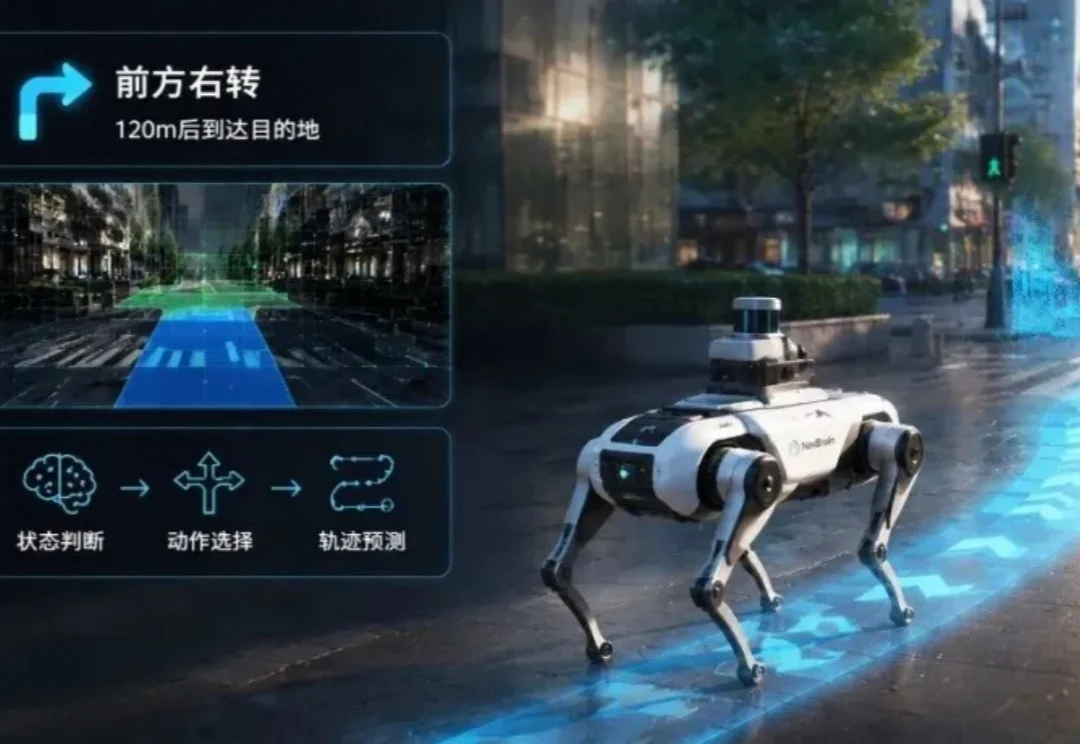
商业地图可以告诉机器人「前方右转」,却无法直接告诉它眼前应该从哪里转、沿哪一侧通过;即使已经生成路线,控制误差、地面变化和动态障碍,也可能让机器人在行进过程中逐渐偏离。

苏度科技联合创始人、董事长苏昊是ImageNet的核心作者之一,师从李飞飞。这家公司走了一条与硅谷主流“纯大脑黑盒大模型”不太一样的路:软硬件协同设计,上下分层架构,上层负责任务规划与环境理解,下层负责具体物体操作;Sim-to-Real作为核心训练范式,让机器人在虚拟世界里经历几百万年的进化,再迁移到现实。

“AI教母”李飞飞创办的World Labs正式宣布收购美国机器人仿真初创公司SceniX。这笔交易是World Labs成立以来的首笔公开收购,也标志着这家以“空间智能”为旗帜的明星创企,正式将业务边界从3D世界生成推进到物理机器人训练领域。

上海世博展览馆,WAIC 2026,H1-A530展位前围了三层人。

这几天,全网被WAIC“霸屏”,从具身智能到国产算力,这场一年一度的AI盛典,同样吸引了科技圈所有目光。
刚刚结束的 2026 年世界人工智能大会(WAIC) ,具身智能与 AI 终端占据了最显眼的位置,人形机器人、灵巧手和各类智能硬件吸引了大量目光。

近日,国内智能特种机器人企业史河机器人宣布完成C轮融资,由浙江国资旗下强港资本领投,中际控股,以及广投资本、国海证券、君桐资本等机构联合投资,老股东复星锐正继续加码。
2026 年的 WAIC,人形机器人依然是展馆里最密集的品类。后空翻、跳舞、格斗,各类单机演示轮番上阵,技术完成度一年高过一年。

凌晨两点,城市睡着了,前置仓还醒着。