
Meta收购华农校友机器人AI公司,团队并入超级智能实验室
Meta收购华农校友机器人AI公司,团队并入超级智能实验室小扎又出手了,这次瞄准的是人形机器人。 Meta正式完成对机器人AI初创公司Assured Robot Intelligence(简称 ARI)的收购。这家公司专注于机器人智能底层技术,由华南农业大学、中山大学校友王晓龙联合创办。
来自主题: AI资讯
10134 点击 2026-05-02 13:36
 搜索
搜索
小扎又出手了,这次瞄准的是人形机器人。 Meta正式完成对机器人AI初创公司Assured Robot Intelligence(简称 ARI)的收购。这家公司专注于机器人智能底层技术,由华南农业大学、中山大学校友王晓龙联合创办。
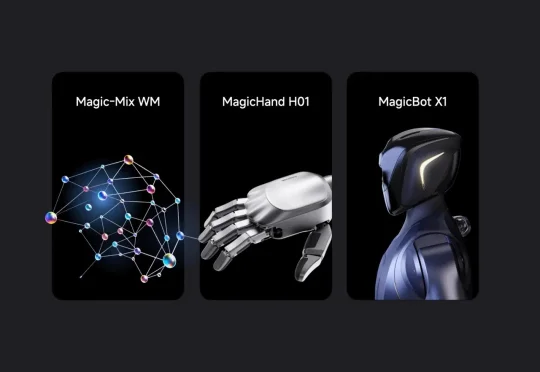
魔法原子在会上推出了新一代人形机器人 MagicBot X1 和灵巧手 MagicHand H01,而且第一次把其世界模型 Magic-Mix、数据生成与训练反馈闭环,作为一套完整的具身智能底层能力集中展示出来。

AI科技评论从多处独家获悉,前蔚来 AI平台负责人白宇利已创立新公司“上海补天石科技”,公司业务聚焦具身数据Infra方向。企查查信息显示,上海补天石科技有限公司于2025年11月成立,法人正是白宇利。
刚刚,宇树发布其迄今定价最低的人形机器人——R1系列双臂人形机器人,支持工业及日常家用多元场景应用,售价2.69万元起。这是宇树首款主打桌面、面向工业场景的低成本轻量化上半身双臂方案。该系列机器人支持5/7自由度单臂、固定/移动底盘,头部模组算力达10TOPS,末端可快速换装,手臂最大负载2kg,腰部±150°、头部±115°/±36°大运动范围。

智元机器人的办公室里,最近员工们一上班就能看到机器人熟练地切着水果:这么全面的能力是如何做到的?答案是直接在真实环境中搞大规模分布式强化学习训练。它们使用的是全新的具身智能训练范式:面向通用机器人策略的分布式多机强化学习(LWD)。这一套技术捅破了当前VLA的「天花板」。

深圳机器人凭什么惊艳全球?答案不在整机,在一颗电机。小象电动用轴向磁通路线突破量产瓶颈,累计出货近7万台,杀入华为、比亚迪、广汽、美团供应链,完成超亿元融资。这是深圳底层硬科技崛起的缩影,也是中国机器人产业链从「能做样机」到「真正量产」的关键一跃。
美西时间4月28日,具身智能行业有史以来,第一场全球性峰会在硅谷落幕!这场大会星光熠熠—— 2015年图灵奖得主、公钥密码学奠基人Martin Hellman做开场主旨演讲,主题是「安全、智能与物理世界的交汇」。

世界模型黑马横空出世!就在刚刚,生数科技的MotuBrain零宣发登顶双榜,直接打通「看懂世界+执行行动」,而且不同的是,他们把World Action Model适配多个头部机器人本体,完成多个长程任务,这是国产AI的硬核突围!从此,具身智能彻底迈入新纪元。

这是一场前所未有的发布会。直播中,超维动力(Kinetix AI)联合创始人 Tyler Zheng 首先亮相,但并没说几句话,就话锋一转:「我们相信如果机器人已经足够拟人,也许它也可以自己来介绍自己。」就把舞台交给了今天的主角 KAI。
就在这一背景下,银河通用联合清华北大英伟达等众多机构联合发布了跨本体「隐式世界-动作基础模型」LDA-1B,将目光投向了具身智能 Scaling Law 的这个终极命题:如何让模型有效利用互联网规模的异构数据。