真实场景文档理解:字节发布的WildDoc基准数据集向OCR提出了什么挑战?
真实场景文档理解:字节发布的WildDoc基准数据集向OCR提出了什么挑战?最近,字节跳动团队联合华中科技大学发布的基准数据集 WildDoc 引起了对 OCR 能力的再衡量。
来自主题: AI资讯
12896 点击 2025-06-11 14:54
 搜索
搜索
最近,字节跳动团队联合华中科技大学发布的基准数据集 WildDoc 引起了对 OCR 能力的再衡量。
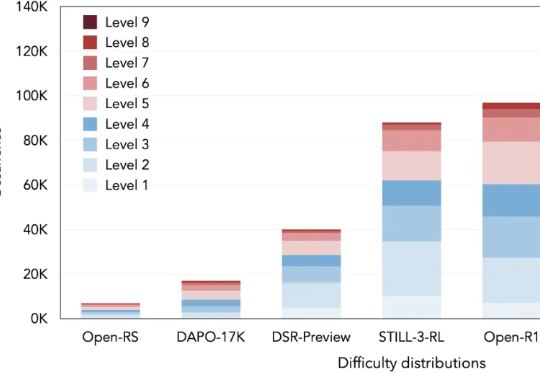
本文将介绍 DeepMath-103K 数据集。该工作由腾讯 AI Lab 与上海交通大学团队共同完成。
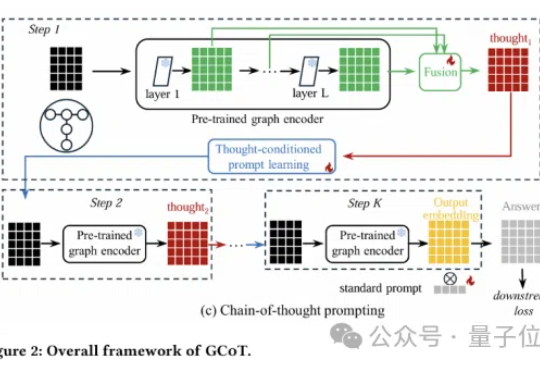
图神经网络还能更聪明?思维链提示学习来了!

AI 搜索引擎初创公司 Perplexity AI 本周四宣布推出 SEC(证券交易)文件访问功能,旨在使复杂的财务数据变得更易于理解,适合从学生到顾问、再到日间交易者等各类投资者。

在多智能体AI系统中,一旦任务失败,开发者常陷入「谁错了、错在哪」的谜团。PSU、杜克大学与谷歌DeepMind等机构首次提出「自动化失败归因」,发布Who&When数据集,探索三种归因方法,揭示该问题的复杂性与挑战性。

如何让CLIP模型更关注细粒度特征学习,避免“近视”?360人工智能研究团队提出了FG-CLIP,可以明显缓解CLIP的“视觉近视”问题。让模型能更关注于正确的细节描述,而不是更全局但是错误的描述。
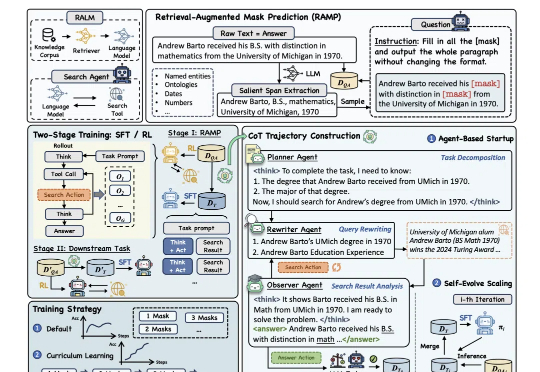
为提升大模型“推理+搜索”能力,阿里通义实验室出手了。
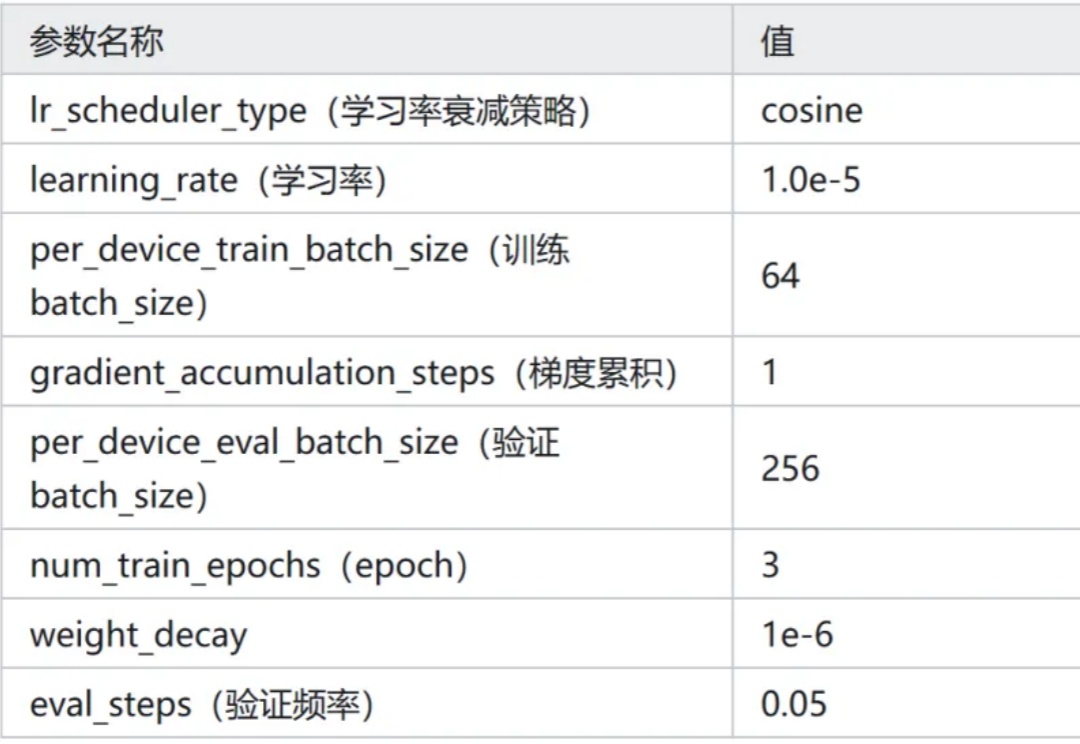
新增 Qwen3-0.6B 在 Ag_news 数据集 Zero-Shot 的效果。新增 Qwen3-0.6B 线性层分类方法的效果。
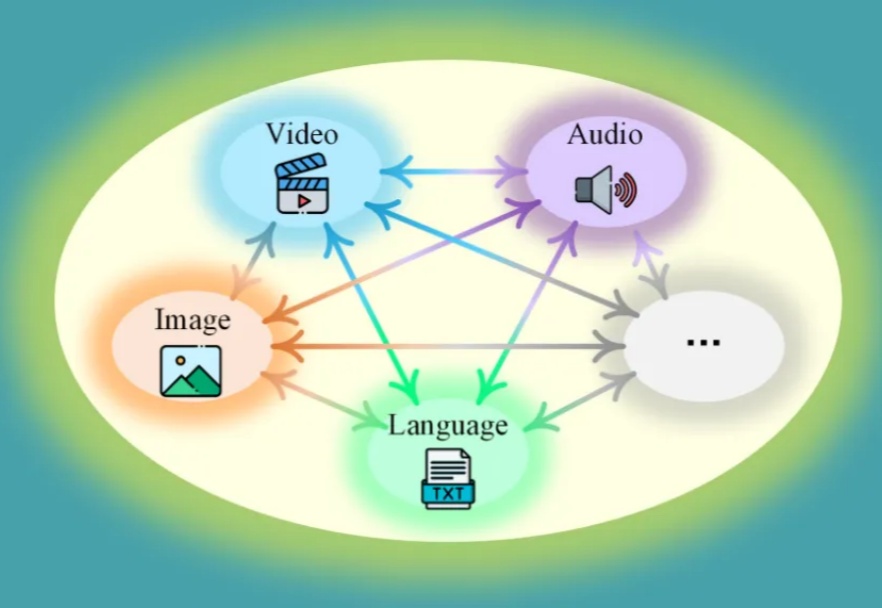
理想中的多模态大模型应该是什么样?十所顶尖高校联合发布General-Level评估框架和General-Bench基准数据集,用五级分类制明确了多模态通才模型的能力标准。当前多模态大语言模型在任务支持、模态覆盖等方面存在不足,且多数通用模型未能超越专家模型,真正的通用人工智能需要实现模态间的协同效应。

统一图像理解和生成,还实现了新SOTA。