
北大港大:大模型发现了人类从未想到的纳什均衡算法
北大港大:大模型发现了人类从未想到的纳什均衡算法大模型开始进入理论计算机科学最核心的问题之一:算法设计。
来自主题: AI技术研报
9278 点击 2026-06-08 14:49
 搜索
搜索
大模型开始进入理论计算机科学最核心的问题之一:算法设计。

北大彭宇新团队提出「美学照片重构」新任务,从摄影教学视频中自动构建数据集AesRecon,并开发两阶段模型AesFormer,通过优化构图、视角与人物姿态,提升照片的美感与艺术表现力。
过去一年,AI 推理模型的使用成本让不少开发者叫苦。
近年来,大语言模型在数学、代码等任务上的表现不断刷新上限,但到了医疗诊断、故障排查这类真实世界任务里,真正困难的是让多个智能体在不确定的动态环境中持续协作推理。
近年来,大语言模型能力的提升,已不再仅仅依赖于更大的模型规模或更多的训练数据。越来越多的研究开始探索另一条路径:通过多个专家模型的协作来完成生成任务。
近日,普林斯顿大学的研究团队发布了一篇新论文,提出了一个名为 Goedel-Architect 的智能体框架。他们用的核心模型,是国内开源大模型 DeepSeek-V4-Flash。
近日,来自清华大学智能产业研究院(AIR)的团队联合北京智源研究院(BAAI)、北京大学、南京大学等机构构建了一个基准:GeoCodeBench。这是一个面向 3D 几何计算机视觉的 PhD 级 coding benchmark,

早在 2023 年大模型快速发展期,哈工大张民教授立知大模型团队已开展多模态大模型驱动的视频内容创作智能体研究,并全球首发开源了电影制作智能体 FilmAgent 与动画片生成智能体 Anim-Director,受到国内外智能体研究者与文艺创作者的广泛关注。
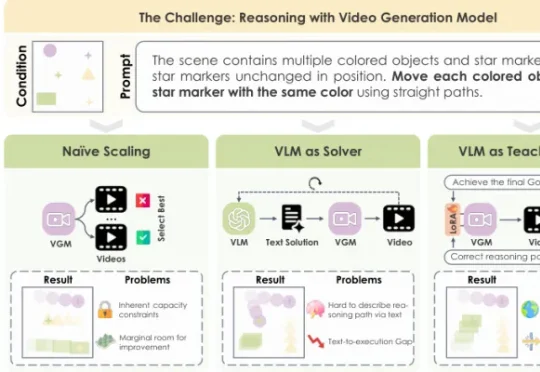
怎么让VGM学会按规则推理?过去主要有两条路。两条路,一个不动模型,一个只写文字,都没真正解决“执行”问题。为此,城大×快手可灵提出了第三条路:VLM-as-Teacher。
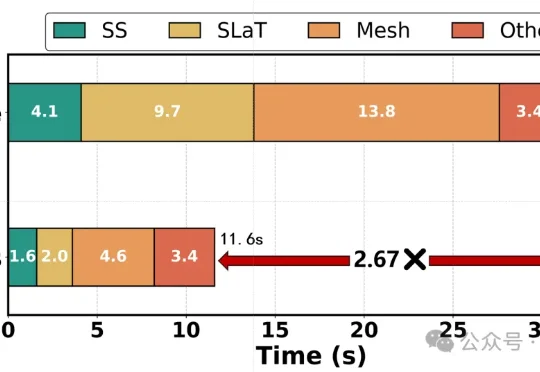
来自中国科学院计算技术研究所、ETH Zurich等机构的研究者提出了Fast-SAM3D。该方法直接面向SAM3D的推理链路做训练无关加速,在最大程度保持重建质量的同时,将单对象生成提速最高2.67倍,场景生成提速最高2.01倍。