国产医疗大模型登顶权威榜单!核心秘籍:PB级训练数据、模拟医生真实会诊过程
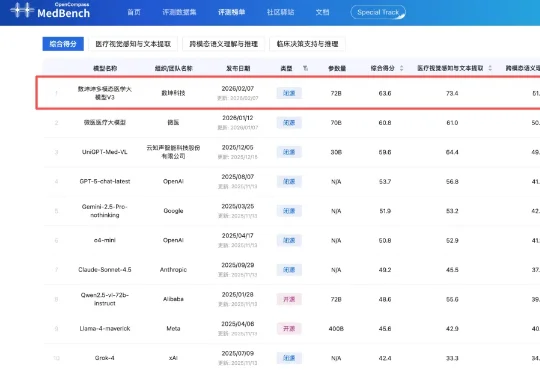
国产医疗大模型登顶权威榜单!核心秘籍:PB级训练数据、模拟医生真实会诊过程2月7日,中文医疗大模型评测平台MedBench公布最新多模态大模型评测榜单,数坤科技的数坤坤多模态医学大模型V3以63.6分拿下第一。在榜单中,V3的表现超过微医、云知声旗下医疗行业大模型,以及OpenAI、谷歌、阿里千问旗下通用大模型。
来自主题: AI资讯
8374 点击 2026-02-14 10:38
 搜索
搜索
2月7日,中文医疗大模型评测平台MedBench公布最新多模态大模型评测榜单,数坤科技的数坤坤多模态医学大模型V3以63.6分拿下第一。在榜单中,V3的表现超过微医、云知声旗下医疗行业大模型,以及OpenAI、谷歌、阿里千问旗下通用大模型。
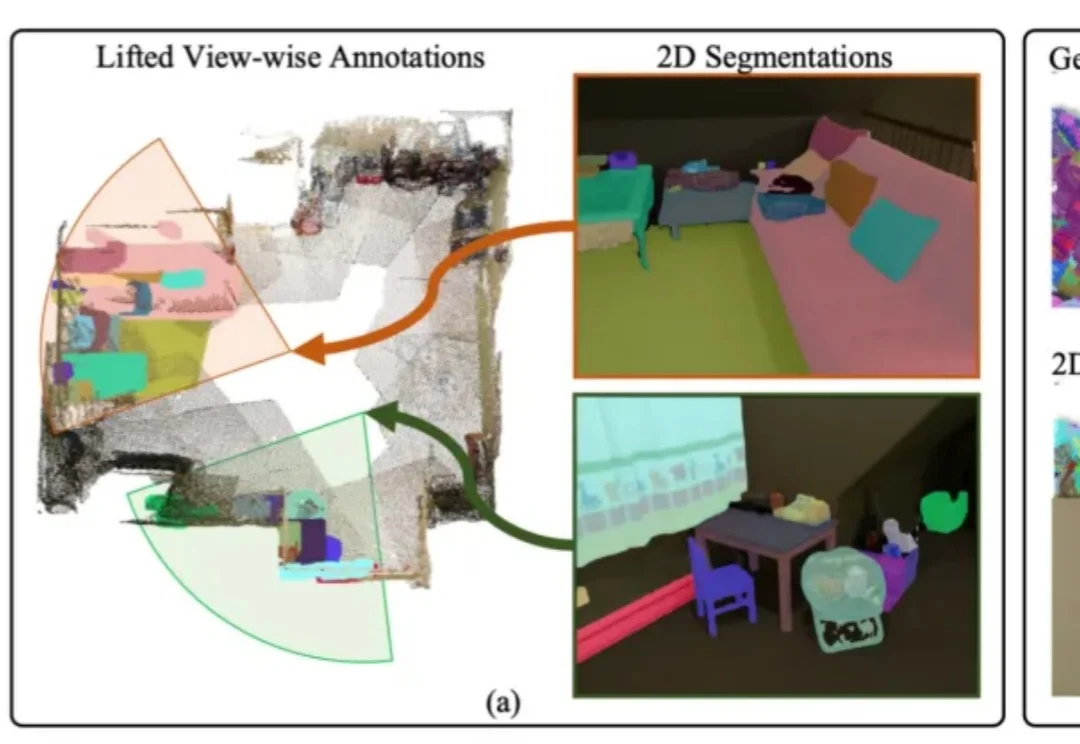
3D模型的实例分割一直受限于稀缺的训练数据与高昂的标注成本,训练效果有待提升。
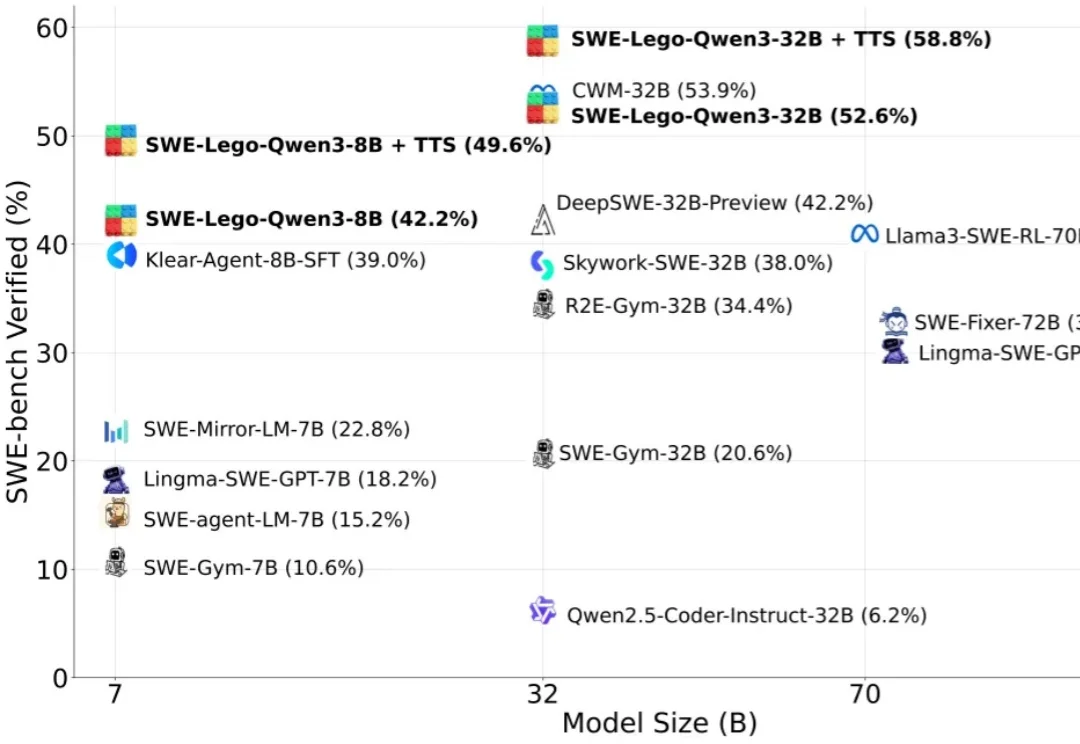
“软工任务要改多文件、多轮工具调用,模型怎么学透?高质量训练数据稀缺,又怕轨迹含噪声作弊?复杂 RL 训练成本高,中小团队望而却步?”
融资35亿后,Kimi的新模型紧跟着就要来了?!大模型竞技场上,一个名叫Kiwi-do的神秘模型悄然出现。发现这个新模型的推特网友询问了模型的身份,结果模型自报家门,表示自己来自月之暗面Kimi,训练数据截止到2025年1月。
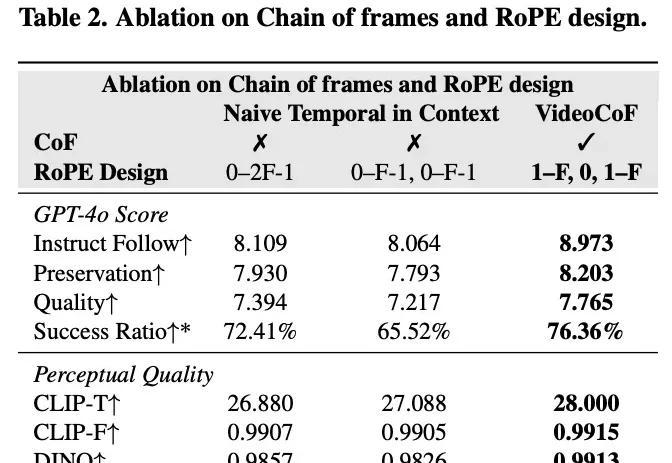
现有的视频编辑模型往往面临「鱼与熊掌不可兼得」的困境:专家模型精度高但依赖 Mask,通用模型虽免 Mask 但定位不准。来自悉尼科技大学和浙江大学的研究团队提出了一种全新的视频编辑框架 VideoCoF,受 LLM「思维链」启发,通过「看 - 推理 - 编辑」的流程,仅需 50k 训练数据,就在多项任务上取得了 SOTA 效果,并完美支持长视频外推!
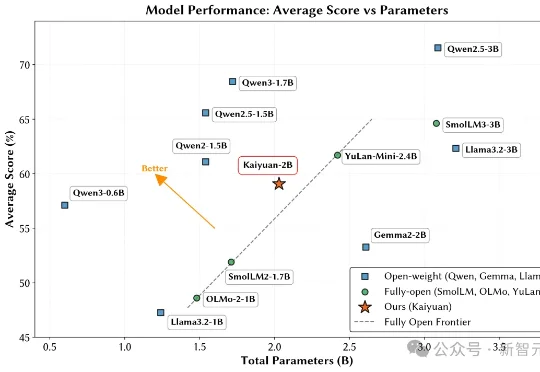
鹏城实验室与清华大学PACMAN实验室联合发布了鹏城脑海‑2.1‑开元‑2B(PCMind‑2.1‑Kaiyuan‑2B,简称开元‑2B)模型,并以全流程开源的方式回应了这一挑战——从训练数据、数据处理框架、训练框架、完整技术报告到最终模型权重,全部开源。

VLA模型性能暴涨300%,背后训练数据还首次实现90%由世界模型生成。

2023 年,三星公司在接入 ChatGPT 不久之后,接连发生数起内部机密泄露事件。事件起因是三星员工将半导体设备参数、产品源代码和生产良率等商业机密直接输入对话系统,导致敏感信息被录入 ChatGPT 的训练数据库。

在腾讯四年,朱庆旭曾将多种训练数据喂给具身模型,最终他得出结论:“基于遥操作数据训练的主流方案,有着原理性缺陷。”
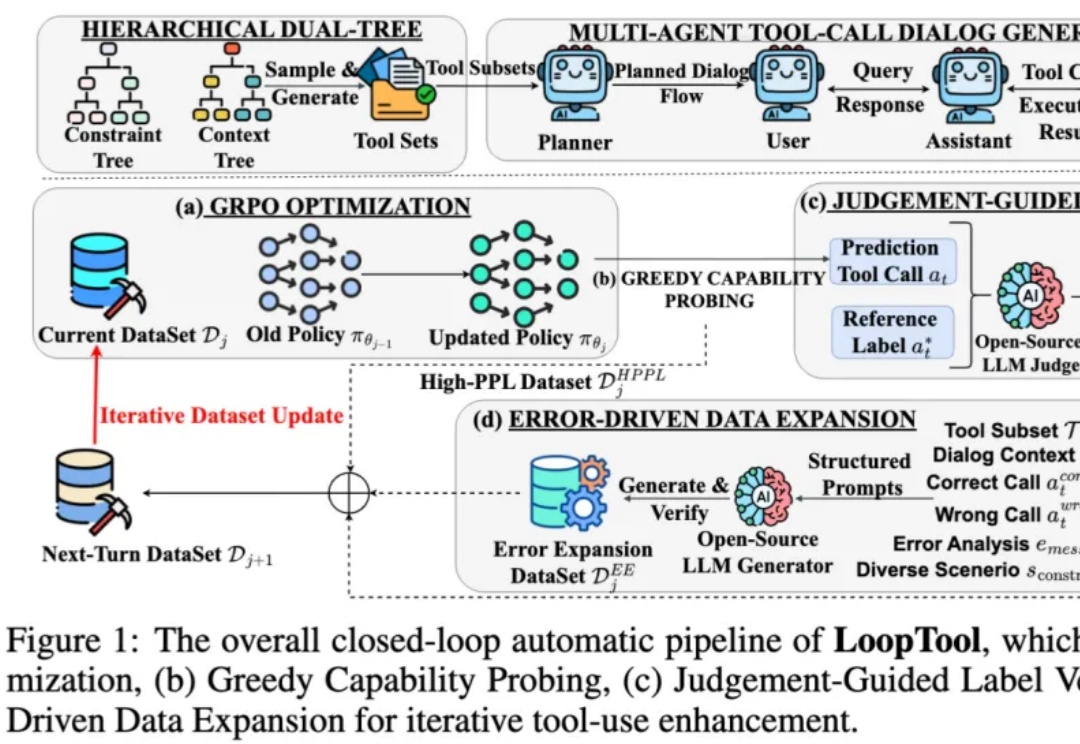
在过去两年,大语言模型 (LLM) + 外部工具的能力,已成为推动 AI 从 “会说” 走向 “会做” 的关键机制 —— 尤其在 API 调用、多轮任务规划、知识检索、代码执行等场景中,大模型要想精准调用工具,不仅要求模型本身具备推理能力,还需要借助海量高质量、针对性强的函数调用训练数据。