
Genesis AI 发了一款三折叠机器人
Genesis AI 发了一款三折叠机器人通用机器人不一定要像人,Genesis AI 的答案是:收起头和腿,把真正像人的部分留给手。
来自主题: AI资讯
9851 点击 2026-06-17 15:06
 搜索
搜索
通用机器人不一定要像人,Genesis AI 的答案是:收起头和腿,把真正像人的部分留给手。
通用机器人,不必长得像人。
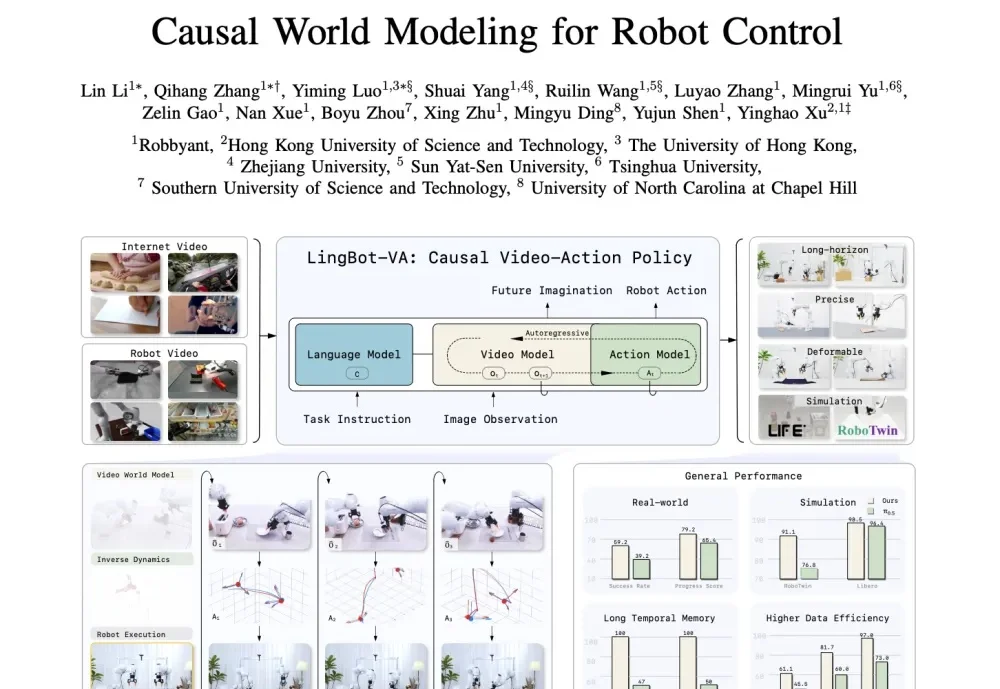
赋予机器人物理理解和预测能力是通用操作的关键。蚂蚁灵波等机构提出的 LingBot-VA 试图将视频帧预测与动作推理统一起来,让机器人通过自回归扩散框架学会“一边思考一边行动”。

后空翻、跑酷、单手抓举几十公斤……

AI科技评论独家消息,前月之暗面后训练与强化学习负责人宋鸿涌(Flood Sung)已于 2025 年 12 月离职,创立机器人公司「北京十六号机器人科技有限公司」(XVI Robotics),公司业务方向聚焦通用人形机器人基座模型。

智元机器人的办公室里,最近员工们一上班就能看到机器人熟练地切着水果:这么全面的能力是如何做到的?答案是直接在真实环境中搞大规模分布式强化学习训练。它们使用的是全新的具身智能训练范式:面向通用机器人策略的分布式多机强化学习(LWD)。这一套技术捅破了当前VLA的「天花板」。

具身智能(Embodied AI)正从算法狂欢转向物理落地的「深水区」。在FLEXIVERSE 2026发布会上,非夕科技不仅通过Enlight、Orion、MICO等新品完成了从「单臂」到「通用机器人智能底座」的升维,更在现场达成了2000台机器人的战略合作签约。全身皮肤级力感知、720°超限旋转、双臂原生协同、无源吸附壁虎夹爪——

国内首个聚焦家庭通用机器人的公司——未来不远,再次宣布完成新一轮数亿元融资。除了持续进入更多真实家庭实现 C 端商业化,团队还会持续在基础研究和前沿探索加大人才和资金投入。

银河通用机器人宣布完成 25 亿元新一轮融资,投资方包括国家人工智能产业基金(国家大基金三期)、中国石化、中信投资控股、中国银行、上汽集团金控、中芯聚源、亦庄国投、未来产业投资、鲲鹏基金、无锡创投、福建产投等及多家老股东继续追加投资。
是蚂蚁灵波又又又又(连续第4天)开源的狠活儿——全球首个用于通用机器人控制的因果视频-动作世界模型,LingBot-VA。但LingBot-VA就不一样了,它通过自回归视频预测打破了这种思考方式,在动手之前,脑子里先把未来几秒的画面推演出来。