全球首个!银河通用新框架仅需人类视频即可部署,特斯拉蚌埠住了
全球首个!银河通用新框架仅需人类视频即可部署,特斯拉蚌埠住了终于,现学现用的风也是吹到了具身智能。
来自主题: AI技术研报
8489 点击 2026-07-17 10:41
 搜索
搜索
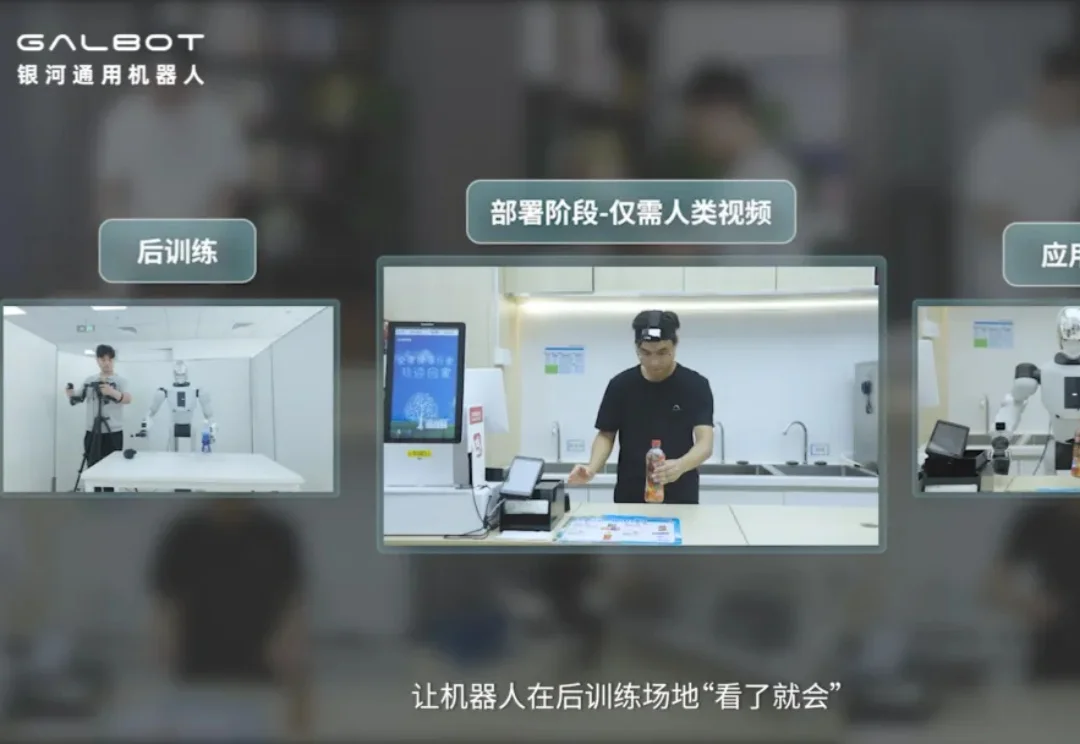
终于,现学现用的风也是吹到了具身智能。

银河通用团队用史上最大、整整 20 亿帧的动捕数据,训练出了全球首个人形机器人全身实时运控基座大模型,该模型零样本泛化全新动作,成功率从 MLP 架构的 76.89% 跃至 92.58%,推理延迟仅 0.39ms,效果超越英伟达 SONIC,甚至比目前业内主流 TWIST 系统速度提升至五倍。
就在这一背景下,银河通用联合清华北大英伟达等众多机构联合发布了跨本体「隐式世界-动作基础模型」LDA-1B,将目光投向了具身智能 Scaling Law 的这个终极命题:如何让模型有效利用互联网规模的异构数据。

银河通用机器人宣布完成 25 亿元新一轮融资,投资方包括国家人工智能产业基金(国家大基金三期)、中国石化、中信投资控股、中国银行、上汽集团金控、中芯聚源、亦庄国投、未来产业投资、鲲鹏基金、无锡创投、福建产投等及多家老股东继续追加投资。
从灵巧手开始「制造时间」:揭秘 Sharpa 的通用人工智能之路 作者|Li Yuan 编辑|郑玄 今年的春晚,已经变成机器人大战了。 在热闹之下,笔者关注到了一个很有趣的细节,相比于去年的机器人,今

全球第一个负载50公斤的、真实自主干活的具身智能机器人,已经进宁德时代工厂干活了!

宇树科技和智元机器人争夺春晚门票时,有人却在默默刷新行业融资纪录。银河通用宣布,完成超过3亿美元(约合人民币21亿元)C轮融资。3亿美元,刷新了通用智能机器人领域的单轮融资纪录。至此,银河通用累计融资接近8亿美元,最新估值升至30亿美元,成为国内估值最高的通用智能机器人初创公司。

昨天,具身智能的圈子“炸”了。不是因为某家公司发布了新产品,而是因为一场“具身武林大会”—— 2025智源具身智能Open Day。现场有多火爆?这么说吧,银河通用、智元、星海图、自变量、原力灵机、加速进化、北京人形、星源智、优必选、
做灵巧手如果不会用工具,跟咸鱼(夹爪)有什么区别?

北京大学,银河通用,阿德莱德大学,浙江大学等机构合作,探究如何构建具身导航的基座模型(Embodied Navigation Foundation Model)提出了NavFoM,一个跨任务和跨载体的导航大模型。实现具身导航从“专用”到“通用”的技术跃进