ECCV2026|4步去噪实现12.66 FPS,清华、港科大提出实时流式视频编辑框架LiveEdit
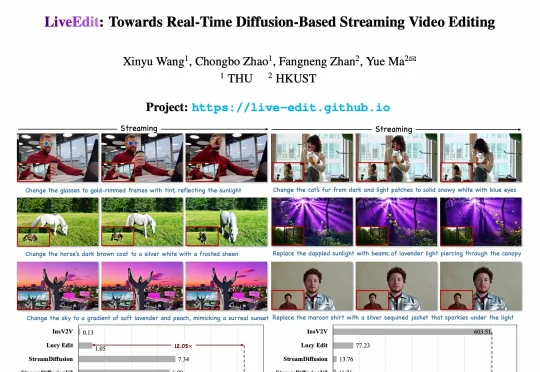
ECCV2026|4步去噪实现12.66 FPS,清华、港科大提出实时流式视频编辑框架LiveEdit近日,清华大学与香港科技大学的研究团队提出 LiveEdit,一种面向通用文本指令的实时流式视频编辑框架。该方法以因果、分块的方式处理持续到来的视频,在 4 步 / 视频块的推理条件下实现 12.66 FPS 的流式编辑,并能保持被编辑区域的准确性以及未编辑区域的一致性。
来自主题: AI技术研报
7418 点击 2026-08-01 10:44