# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
3999元,不够买一台苹果手机,但能DIY个机器人(doge)。
还是家务全能型选手!
不仅能擦桌子:
还能给植物浇水:
甚至可以用逗猫棒陪猫玩:
这个名为XLeRobot的机器人开源项目由中国研究员王高天发起,零件成本仅3999元起。

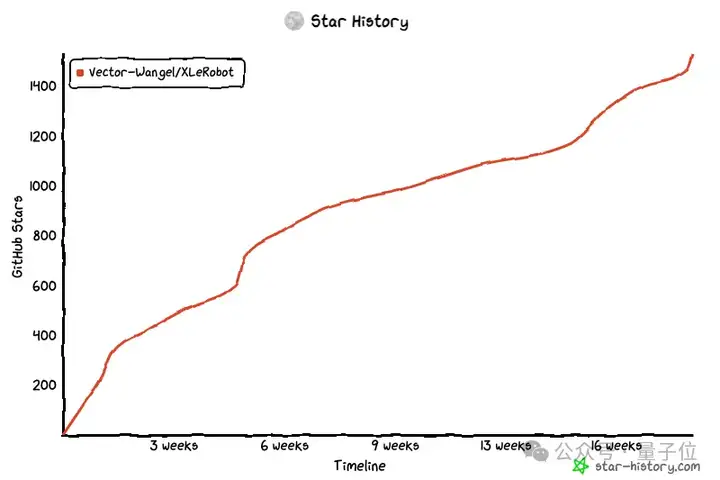
该项目开源以来,增星迅猛,目前已累计1.6k标星。
还被抱抱脸联合创始人Thomas Wolf “wow”推荐。
有网友调侃:给它长个脸,可就不只是这个价格了(6k美元折合约4.3w人民币)
为什么那么便宜?
一方面是,因为零部件可以自由调整(如果能买到更便宜的替代,为什么不呢)。

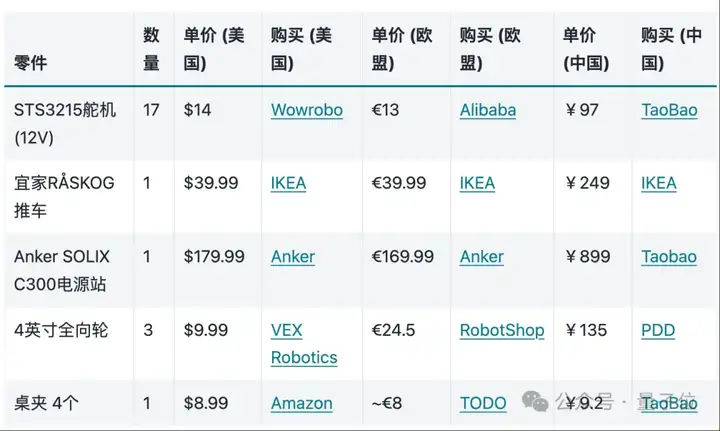
核心硬件包括:

进阶版本还可以调整为视野更广的RGB头部相机。
其他零件像STS3215舵机(15V)、全向轮、桌夹等,作者也都在项目文档中详细列出。
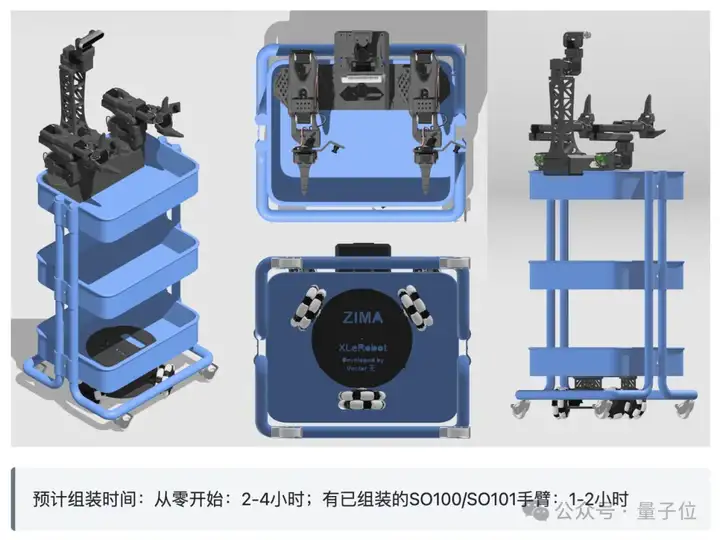
组装时间预计4小时,和一盒乐高差不多(甚至还要更简单些)。
喜欢DIY的手工人已经按耐不住了。
另一方面,在训练方法上,代码和教程参考了多个开源项目:LeRobot、SO-100/SO-101、Lekiwi、Bamb。

基于LeRobot Sim2real,XLeRobot仅用4090 GPU在纯模拟环境(Maniskill)中进行1小时强化学习训练,就得到了这个效果:
项目主页还附有完整的操作教程,手把手教你从创建Conda环境到相机可视化。

还有完整的手臂和系统控制教程。

除了功能丰富,可操作性强,它在安全性上可以说是让人相当放心。
看,就连一只猫都打不过:
宠物友好,非常适合家用。
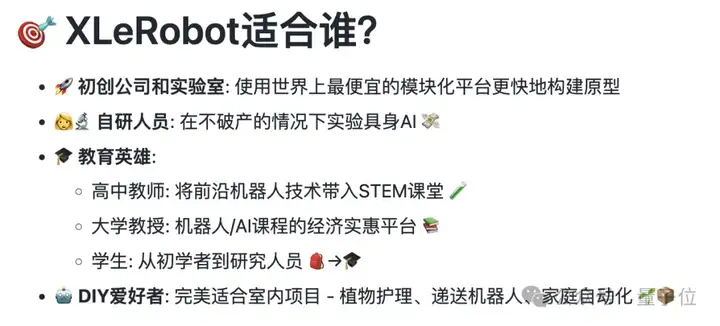
且不止适合家用:
XLeRobot项目一经发布,就在开源圈引发热议,目前Github已达1.6k星。

网友们纷纷表示迫不及待,想要试一下。
开源yyds,不仅有创新性,还能节约成本。


况且,这个价格实在太诱人了——

当网友询问对下一个迭代的看法时,项目作者王高天回复:
未来的升级将更多地以模块化附加件的形式进行。

下周,作者还计划正式在淘宝京东售卖面向开发者的组装套件。


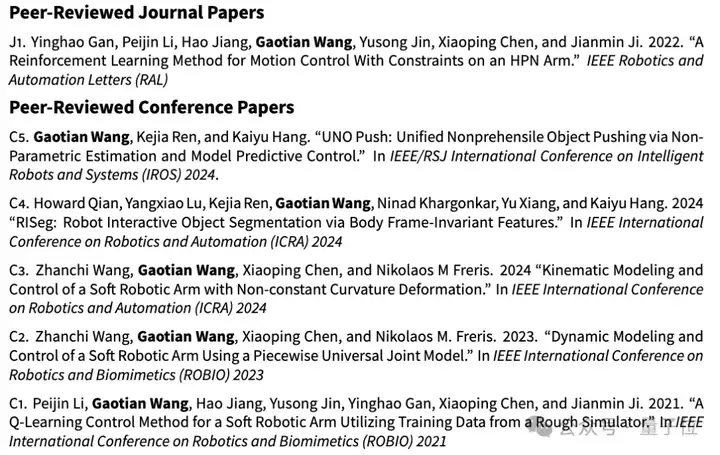
王高天,本科就读于中国科学技术大学物理学院,博士期间转向机器人操作(Robotics)领域,目前就读于莱斯大学,研究方向为机器人泛化鲁棒物体操纵算法和基于物理的生成式世界模型。
值得一提的是,他作为第一作者与波士顿动力AI研究所(RAI)合作开发的Caging in Time泛化鲁棒物体操纵框架,已在机器人顶刊IJRR发表。
此外,他还在IROS、ICRA、RAL等知名机器人期刊和会议上发表了多篇涉及非抓握物体操纵、交互感知及软机器人等方向的论文。
出于个人爱好,王高天打造了XLeRobot,既可以用来验证他的研究理论,也能给对机器人和具身人工智能感兴趣的人提供一个低成本的实践平台。
此外,目前XLeRobot的主要贡献者还有其他3位。
Zhuoyi Lu,负责RL sim2real部署,在真实机器人上进行远程操作(Xbox、VR、Joycon)。
Nicole Yue,负责搭建文档网站。
王跃嵩,负责Mujoco仿真。
代码仓库:https://github.com/Vector-Wangel/XLeRobot
文档网站:https://xlerobot.readthedocs.io/zh-cn/latest/index.html
参考链接:
[1]https://x.com/Thom_Wolf/status/1964299588602310936
[2]https://x.com/VectorWang2/status/1952198208702022018
[3]https://mp.weixin.qq.com/s/N-QbfavE-2APrcKxFEwVQQ
[4]https://vector-wangel.github.io/
文章来自于“量子位”,作者“不圆 时令”。


