# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
灵初智能发布全球首个具身原生人类数据采集方案 Psi-SynEngine。该方案由灵初智能全栈自研,包含便携式外骨骼触觉手套数采套装、大规模 in the wild 数采数据管线、基于世界模型和强化学习的跨本体数据迁移模型,并已率先将采集到的人类数据应用于物流等真实场景。同时,灵初智能同步发布覆盖视觉、语言、触觉、动作的大规模真实世界多模态数据集 Psi-SynNet-v0。这一突破性成果标志着灵初智能全自研的真实世界具身数据引擎已经正式启动。

相比大模型和自动驾驶,数据问题一直是困扰整个具身智能领域的痛点。行业现有的数据采集方案:
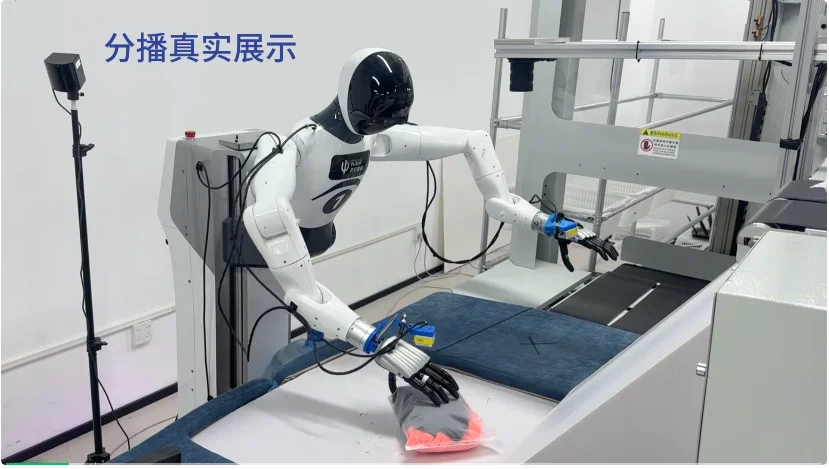
灵初智能 Psi-SynEngine 从根本上突破了上述困境,直接采集一线作业人员在真实工作中的操作数据,而非在搭建的数采场中高成本低保真度采集。采集场景覆盖物流、工厂、商超、酒店和家庭,数据源自真实场景,无需二次迁移。
这与灵初智能从创立之初就选择做通用灵巧操作的战略不谋而合,相比其他硬件形式,灵巧手与人手的形态差异最小,数据迁移效率最高。
相比传统数据采集方案,Psi-SynEngine 具有三大优势:
这些特性使 Psi-SynEngine 成为业内首个具备真正规模化部署能力的具身数据引擎,使灵初智能能够以前所未有的规模和速度积累真实世界具身智能数据资产。
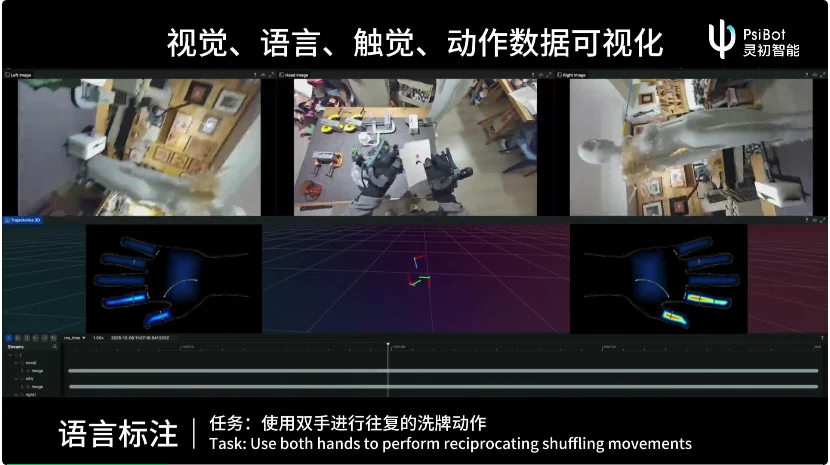
为了让这套具身数据引擎真正释放价值,灵初智能构建了完整的硬件与平台体系。由灵初智能自主研发的专为数采设计的外骨骼触觉手套,定位精度最高能达到亚毫米级别,可完整采集手部和手臂的全部自由度和覆盖全手的触觉信息,同时不影响作业人员的正常操作。此外,灵初智能自主搭建了支持大规模数据处理的管线和平台,配合自研大模型完成高精度的数据标注和后处理,形成完整的数据生产闭环。
基于 Psi-SynEngine 数据引擎,灵初智能发布的 Psi-SynNet-v0 数据集具备四大核心特征:
在这整套数据解决方案中,真正的关键并不在于硬件本身,也不在于高效的采集流程,而是如何将人类数据真正应用到机器人操作上。核心难点在于:如何弥合人手与灵巧手之间天然存在的结构与能力差异。灵初智能早在 2023 年起就开始攻关这一难题,成功实现了将人手的数据迁移到不同自由度的灵巧手上,并完成同样的操作。同时,团队发表了相关的论文成果和 demo。如今,这项技术被迅速工程化,发展为基于世界模型、强化学习和触觉模态对齐的完整解决方案,能有效解决人和不同机器人之间跨本体差异的 embodiment gap,大幅提升模型泛化性和成功率。这正是灵初智能 Psi-SynEngine 真正的护城河所在。
Psi-SynEngine 数据引擎和 Psi-SynNet-v0 数据集的发布,标志着灵初智能基于人类真实操作数据的具身智能新范式正式确立,也意味着向真实世界的具身 AI 大模型预训练拥有了可规模化的可能。依托于 Psi-SynEngine,灵初智能已在公司内部迅速构建出上万小时规模的 Psi-SynNet-v0 数据集,并计划于明年突破百万小时量级,这将是全球最大的灵巧操作数据集,也将成为训练真正具身原生大模型的核心资产。灵初智能诚邀全球研究机构与合作伙伴携手共建 Psi-SynNet,共同开启通用智能新时代。
灵初智能(PsiBot),作为国内具身智能科技领域的领军企业,专注深耕通用具身智能、VLA 大模型以及灵巧操作算法等前沿技术。公司的核心团队成员均来自顶尖高校的 AI 实验室以及头部科技企业,汇聚了行业内的顶尖人才。
凭借深厚的技术积累与创新能力,灵初智能成功推出了行业内首个端到端强化学习具身模型 Psi R0、R0.5 及 R1,成为行业内率先实现长程任务的具身模型研发企业,并且兼具泛化性、鲁棒性、灵巧性。该成果获得了行业头部客户的高度认可,目前,灵初智能正全力加速推进相关技术的商业落地进程,引领具身智能技术迈向新的发展阶段。
文章来自于“机器之心”,作者 “机器之心编辑部”。


