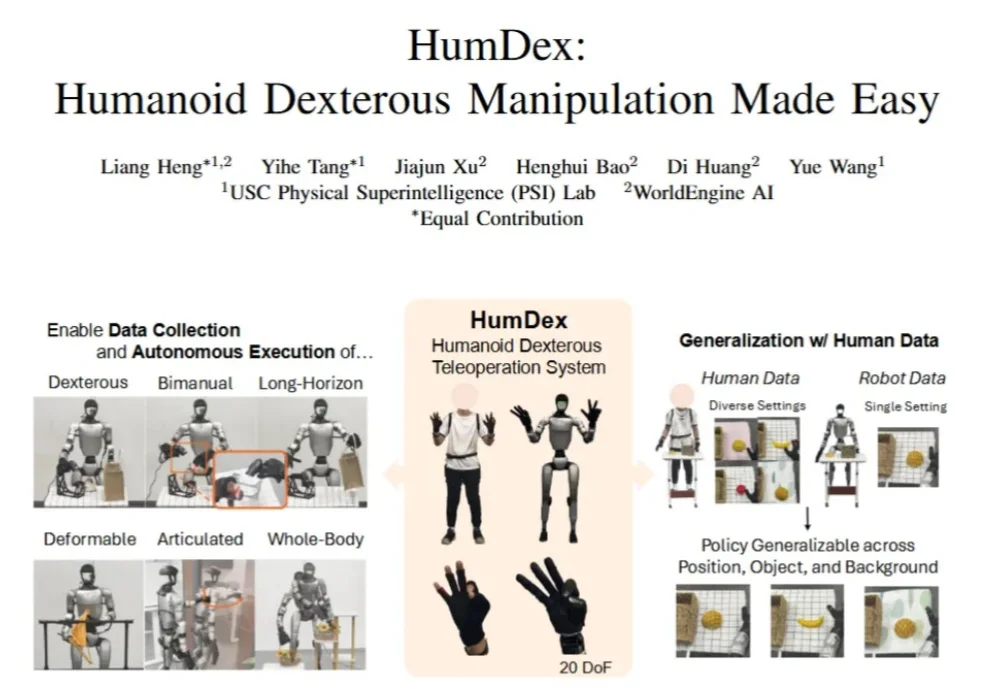
USC团队发布HumDex:攻克人形机器人数据瓶颈,低成本实现全身灵巧操控 USC团队发布HumDex:攻克人形机器人数据瓶颈,低成本实现全身灵巧操控 关键词: AI新闻,HumDex,USC,具身智能,模型训练 人形机器人全身灵巧操作是通向通用具身智能的核心目标之一。在这一愿景下,机器人不仅需要双臂与高自由度多指灵巧手的精细协调,还需要与全身位姿(如行走、弯腰)进行动态配合。 来自主题: AI技术研报 5208 点击 2026-04-07 09:26