
靠给用户念书,AI语音产品移动端月入千万
靠给用户念书,AI语音产品移动端月入千万两年过去,ElevenLabs 已经融资 2.6 亿美元,网站访问量超 2500 万,稳坐 AI Web 全球 Top50 榜单,成为 AI 语音赛道的头部创企。而 Speechify 却渐渐“掉队”,榜单中难觅身影,而作为一个 AI 企业,它仅在 2017 和 2020 年有过两次融资,近几年也没有传出任何融资消息。
来自主题: AI资讯
9827 点击 2025-09-17 09:40
两年过去,ElevenLabs 已经融资 2.6 亿美元,网站访问量超 2500 万,稳坐 AI Web 全球 Top50 榜单,成为 AI 语音赛道的头部创企。而 Speechify 却渐渐“掉队”,榜单中难觅身影,而作为一个 AI 企业,它仅在 2017 和 2020 年有过两次融资,近几年也没有传出任何融资消息。
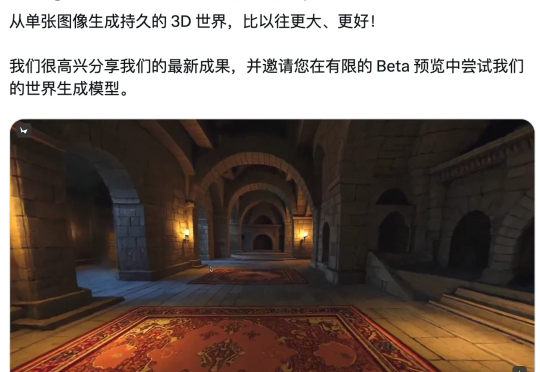
就在今天,斯坦福大学教授李飞飞的创业公司 World Labs 发布了新成果 —— 限量开放的测试预览版空间智能模型 Marble。「只需一张图片,就能生成持久存在的 3D 世界,比以往更宏大、更震撼!」
Thinking Machines Lab成立7个月,估值120亿美元,首次公开研究成果:LLM每次回答不一样的真凶——kernel缺乏批处理不变性。Lilian Weng更是爆猛料:首代旗舰叫 Connection Machine,还有更多在路上。

Meta 已签署一份价值超 1 亿美元的多年度合同,将使用 AI 图像初创公司 Black Forest Labs 的技术,这是这家社交媒体公司为扩展人工智能服务的最新投资。
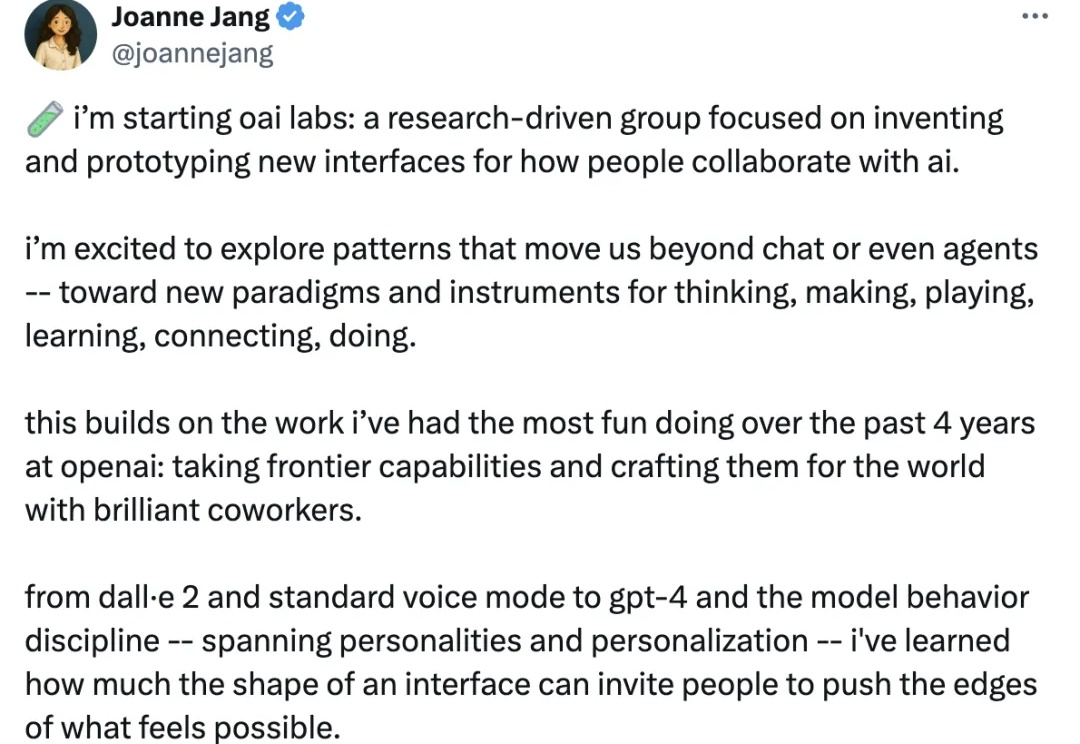
OpenAI又要成立新团队了!

OpenAI重磅结构调整:ChatGPT「模型行为」团队并入Post-Training,前负责人Joanne Jang负责新成立的OAI Labs。而背后原因,可能是他们最近的新发现:评测在奖励模型「幻觉」,模型被逼成「应试选手」。一次组织重组+评测范式重构,也许正在改写AI的能力边界与产品形态。

订阅了 ElevenLabs 的小伙伴看过来,它的开源平替来了!Chatterbox 是全球首个支持强烈情绪控制的开源TTS 模型,更是号称开源 TTS 中的 SOTA ,由 Resemble AI 推出。
陈丹琦加入 Thinking Machines Lab 了?这一猜测不是毫无根据,当我们打开她的 GitHub 主页,邮箱已经变为 thinkingmachines.ai。

最近3D内容生成模型好生热闹,像谷歌Genie 3、World Labs、混元、昆仑争相发布并开测世界模型。
近年来,大语言模型(LLMs)展现出强大的语言理解与生成能力,推动了文本生成、代码生成、问答、翻译等任务的突破。代表性模型如 GPT、Claude、Gemini、DeepSeek、Qwen 等,已经深刻改变了人机交互方式。