重塑人机对话理解范式,Google新数据集首次大规模捕捉用户「未言明的想法」
重塑人机对话理解范式,Google新数据集首次大规模捕捉用户「未言明的想法」当对话型 AI 服务于数十亿用户时,我们能否看见用户没说出口的那一层?JHU、MIT 和 Google Research 给出了新的解法。
来自主题: AI技术研报
8750 点击 2026-05-29 09:18
 搜索
搜索
当对话型 AI 服务于数十亿用户时,我们能否看见用户没说出口的那一层?JHU、MIT 和 Google Research 给出了新的解法。

GPT-5.5被扒出「假思考」,用两小时就被偷偷换成mini,200美元月费买了个「薛定谔的脑子」。Trace命令实锤,官方文档亲自认领。往后有纷纷吐槽:OpenAI,你糊弄谁呢?

腾讯科技、 SkillHub与腾讯玄武实验室联合发布 TRACE 严选框架,为快速增长但缺乏统一标准的 AI Skill 市场建立一套可参照的评测体系。它是一个包含安全扫描、no-skill对照实验、证据包审计、触发率测试、资源代价评估的系统性严选框架,也是国内首个面向Skill真实使用场景的严选评测体系。
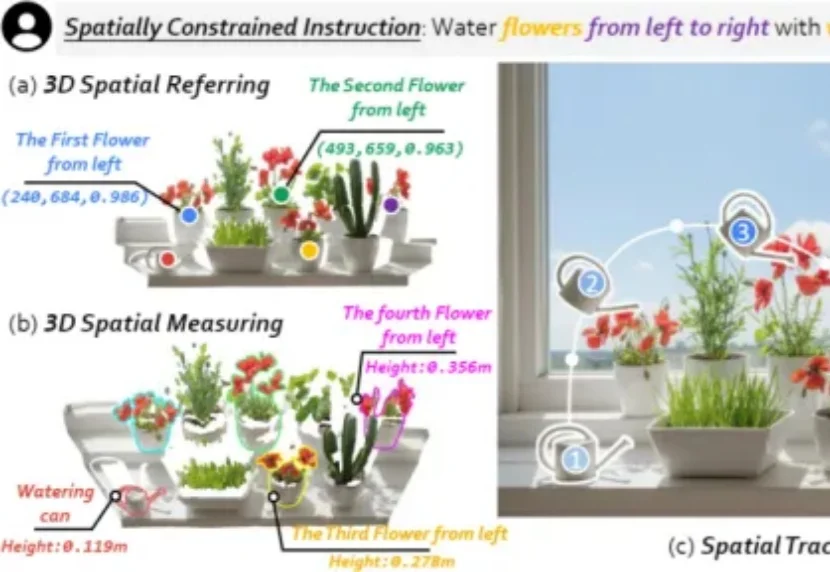
我们希望具身机器人真正走进真实世界,尤其走进每个人的家里,帮我们完成浇花、收纳、清洁等日常任务。但家庭环境不像实验室那样干净、单一、可控:物体种类多、摆放杂、随时会变化,这让机器人在三维物理世界中「看懂并做好」变得更难。

十年前,「黑手党」这个词还属于PayPal。十年后,它成了OpenAI。那些离开OpenAI的人,没有远去,而是在外部重建另一个OpenAI。他们互相投资、互相背书,从算法到资本,织出一张无形的权力网。AI的故事,看似在讲技术,其实是在讲权力的继承。当算法学会模仿人类,人类也在用算法,复制自己的帝国。
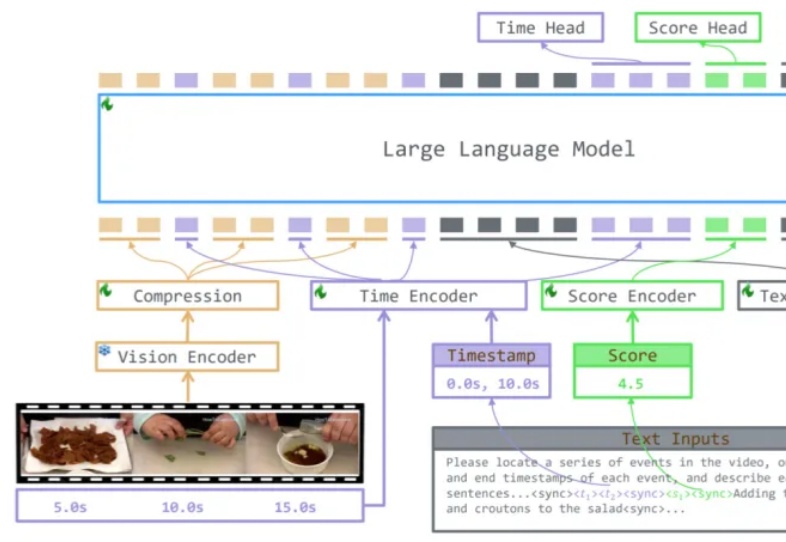
下班回家后你正深陷于一部两小时的综艺节目中,渴望找到那些让人捧腹的爆笑片段,却如同大海捞针。或者,在紧张刺激的足球赛中,你渴望捕捉到那决定性的绝杀瞬间,但传统 AI 视频处理技术效率低下,且模型缺乏泛化能力。为解决这些问题,香港中文大学(深圳)唐晓莹课题组联合腾讯 PCG 发布 TRACE 技术,通过因果事件建模为视频理解大模型提供精准的时间定位能力。
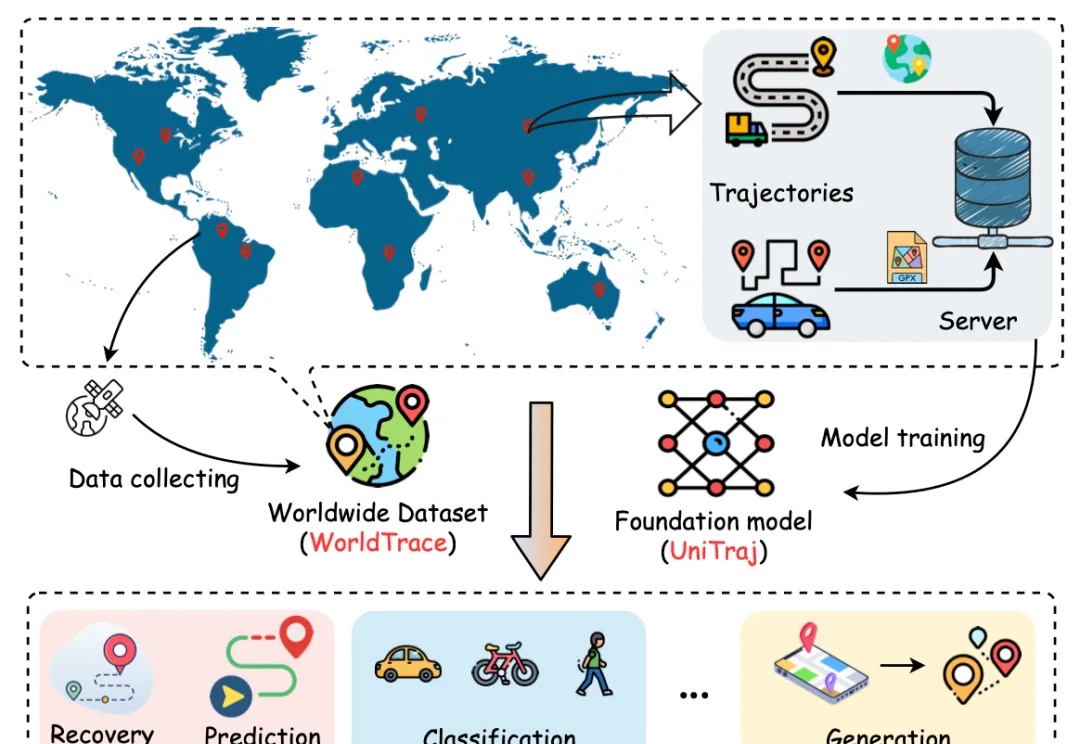
在智慧城市和大数据时代背景下,人类轨迹数据的分析对于交通优化、城市管理、物流配送等关键领域具有重要意义。然而,现有的轨迹相关模型往往受限于特定任务、区域依赖、轨迹数据规模和多样性困乏等问题,限制了模型的泛化能力和实际应用范围。
近日,中科大王杰教授团队 (MIRA Lab) 针对离线强化学习数据集存在多类数据损坏这一复杂的实际问题,提出了一种鲁棒的变分贝叶斯推断方法,有效地提升了智能决策模型的鲁棒性,为机器人控制、自动驾驶等领域的鲁棒学习奠定了重要基础。论文发表在 CCF-A 类人工智能顶级会议 Neural Information Processing Systems(NeurIPS 2024)。