

我嘞个豆!中国企业牵头,ICLR这场Workshop被挤爆了
我嘞个豆!中国企业牵头,ICLR这场Workshop被挤爆了瓜多到一度吃不下的ICLR 2026,这几天终于在巴西开线下了!!没去不要紧,最热闹最好玩的,咱都已经总结好了:随机一个场景都有可能“掉落”LeCun这位巨佬NPC,学术追星人纷纷带着合照意满离;
来自主题: AI资讯
7911 点击 2026-04-29 09:53
瓜多到一度吃不下的ICLR 2026,这几天终于在巴西开线下了!!没去不要紧,最热闹最好玩的,咱都已经总结好了:随机一个场景都有可能“掉落”LeCun这位巨佬NPC,学术追星人纷纷带着合照意满离;

过去一年,具身智能领域迎来了爆发式增长。从后空翻到托马斯回旋,从整理衣物到冲泡咖啡……各类令人惊艳的机器人演示视频层出不穷。

本篇文章被 ICRA 2026 接收并获得 IROS 2025 双料 Workshop 最佳论文,第一作者张子哲(site: zizhe.io)是宾夕法尼亚大学机器人学硕士生,同时在 GRASP 实验室担任科研助理,导师为 Nadia Figueroa 教授,研究兴趣涵盖机器学习,安全控制以及人机交互。

史上首次,ICLR成立后设立机制设计相关Workshop,全球顶流学者众神云集!
嚯!完全由AI生成的论文,通过顶会ICLR workshop评审?!
Sakana AI刚刚官宣,第二代「AI科学家」独立完成论文,通过了ICLR 2025 Workshop的同行评审。这是首次完全由AI端到端生成的科学论文,获得了学术高度认可。
2024年12月4日,两位共同组织了“2024BRAIN NeuroAI Workshop”研讨会,探讨了NeuroAI如何整合到BRAIN计划中并帮助理解和治愈人类脑疾病。请问是什么契机促使两位聚集一起开展NeuroAI这项研究的?
IEEE/CVF国际计算机视觉与模式识别会议(CVPR)是人工智能领域最具学术影响力的顶级会议之一,将于今年 6月11日至6月15日在美国田纳西州举行。
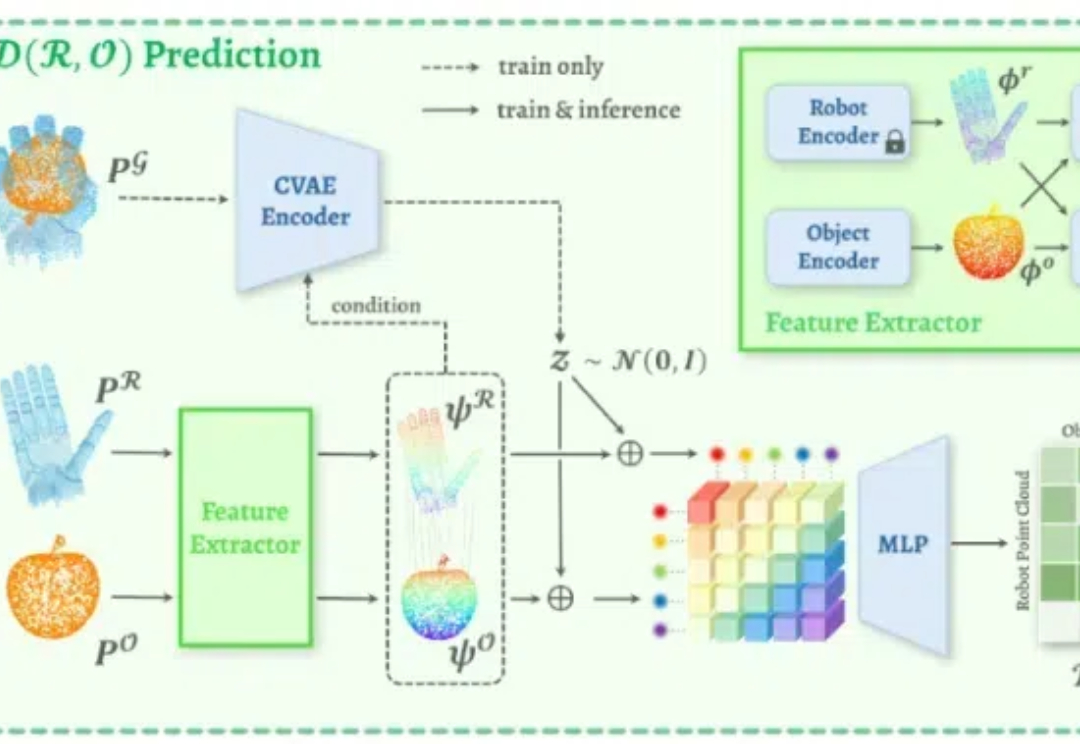
近期,新加坡国立大学计算机学院的邵林团队提出了 D(R,O) Grasp:一种面向跨智能体灵巧抓取的机器人与物体交互统一表示。该方法通过创新性地建模机器人手与物体在抓取姿态下的交互关系,成功实现了对多种机器人手型与物体几何形状的高度泛化能力,为灵巧抓取技术的未来开辟了全新的方向。

学术打野NeurIPS 2024,好多人啊(发出周迅的声音)!