
「部署态」元年,这家公司就把落地方案卷到了七种
「部署态」元年,这家公司就把落地方案卷到了七种黄仁勋曾经说过,AI 时代 token 就是货币,那么谁会是 token 最大的消费者?
来自主题: AI资讯
7940 点击 2026-04-20 14:39
 搜索
搜索
黄仁勋曾经说过,AI 时代 token 就是货币,那么谁会是 token 最大的消费者?

智源研究院(BAAI)、Spin Matrix、乐聚机器人与新加坡南洋理工大学等联合提出了一个全新的终身记忆系统——RoboBrain-Memory。RoboBrain-Memory是全球范围内首个专为全双工、全模态模型设计的终身记忆系统,旨在解决具身智能体在真实世界的复杂交互问题,不仅支持实时音视频中多用户身份识别与关系理解,还能动态维护个体档案与社会关系图谱,从而实现类人的长期个性化交互。
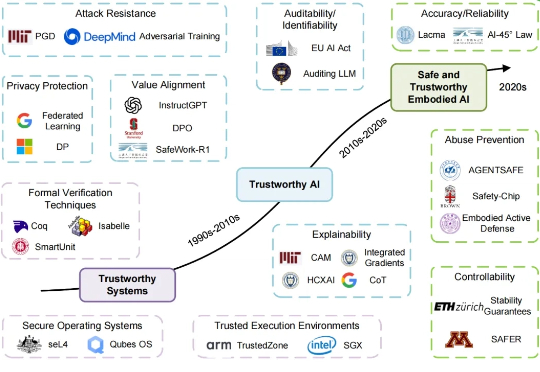
近年来,以人形机器人、自动驾驶为代表的具身人工智能(Embodied Artificial Intelligence, EAI)正以前所未有的速度发展,从数字世界大步迈向物理现实。然而,当一次错误的风险不再是屏幕上的一行乱码,而是可能导致真实世界中的物理伤害时,一个紧迫的问题摆在了我们面前: 如何确保这些日益强大的具身智能体是安全且值得信赖的?
这并非科幻片中的桥段,而是来自清华大学与北京航空航天大学团队的最新成果——BSC-Nav 的真实演示。通过模仿生物大脑构建、维护空间记忆的原理,研究团队让智能体拥有了前所未有的「空间感」。
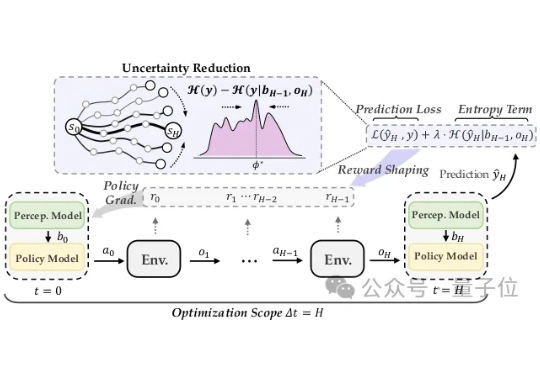
面对对抗攻击,具身智能体除了被动防范,也能主动出击! 在人类视觉系统启发下,清华朱军团队在TPMAI 2025中提出了强化学习驱动的主动防御框架REIN-EAD。
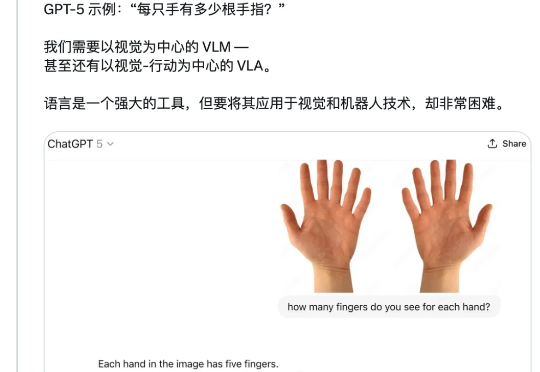
「一只手有几根手指?」 这个看似简单的问题,强如 GPT-5 却并不能总是答对。 今天,CMU 博士生、英伟达 GEAR(通用具身智能体研究)团队成员 Tairan He(何泰然)向 GPT-5 询问了这个问题,结果模型回答错了。
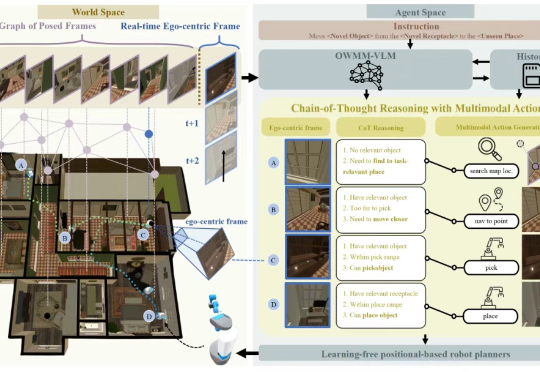
在家庭服务机器人领域,如何让机器人理解开放环境中的自然语言指令、动态规划行动路径并精准执行操作,一直是学界和工业界的核心挑战。

谷歌DeepMind最新基础世界模型Genie 2登场!只要一张图,就能生成长达1分钟的游戏世界。从此,我们将拥有无限的具身智能体训练数据。更有人惊呼:黑客帝国来了。

创新中心正在开发高性能具身智能体“开物”。北京具身智能机器人创新中心正式升级为“国家地方共建具身智能机器人创新中心”,揭牌仪式近日在京举办。

最近,英伟达宣布成立一个新研究部门——通用具身智能体研究实验室GEAR。令人意外的是,该实验室的领导者是两位华人90后博士——范麟熙(Jim Fan)和朱玉可(Yuke Zhu)。