ICLR 2026 | 世界模型卡在多机器人协作?一个「顺序分解」思路打通
ICLR 2026 | 世界模型卡在多机器人协作?一个「顺序分解」思路打通近年来,Decision-Coupled World Model 与 Model-based RL 在机器人领域取得了显著成功。通过学习环境动力学模型,智能体能够在内部模拟未来,从而进行规划与决策。但当系统从单机器人扩展到多机器人时,问题开始变得棘手。
来自主题: AI技术研报
10920 点击 2026-04-02 16:22
 搜索
搜索
近年来,Decision-Coupled World Model 与 Model-based RL 在机器人领域取得了显著成功。通过学习环境动力学模型,智能体能够在内部模拟未来,从而进行规划与决策。但当系统从单机器人扩展到多机器人时,问题开始变得棘手。
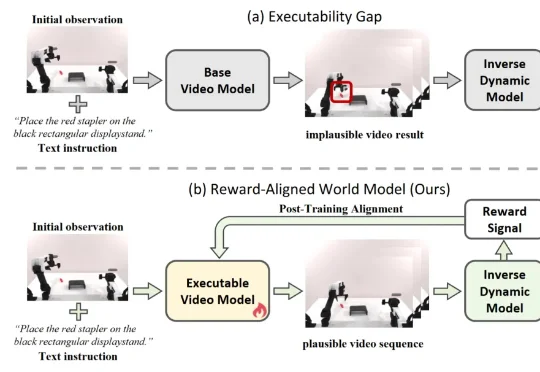
近期,利用视频生成模型为机器人构建 “世界模型”,已成为具身智能领域的热门技术路线。给定当前观测和自然语言指令,这类模型能够先 “想象” 出未来的视觉轨迹,再由逆动力学模型(IDM)将生成画面解码为机器人动作,从而形成 “先预测、后执行” 的解耦式规划范式。由于兼具较强的可解释性与开放场景泛化潜力,这一路线正在受到学术界和工业界的广泛关注。
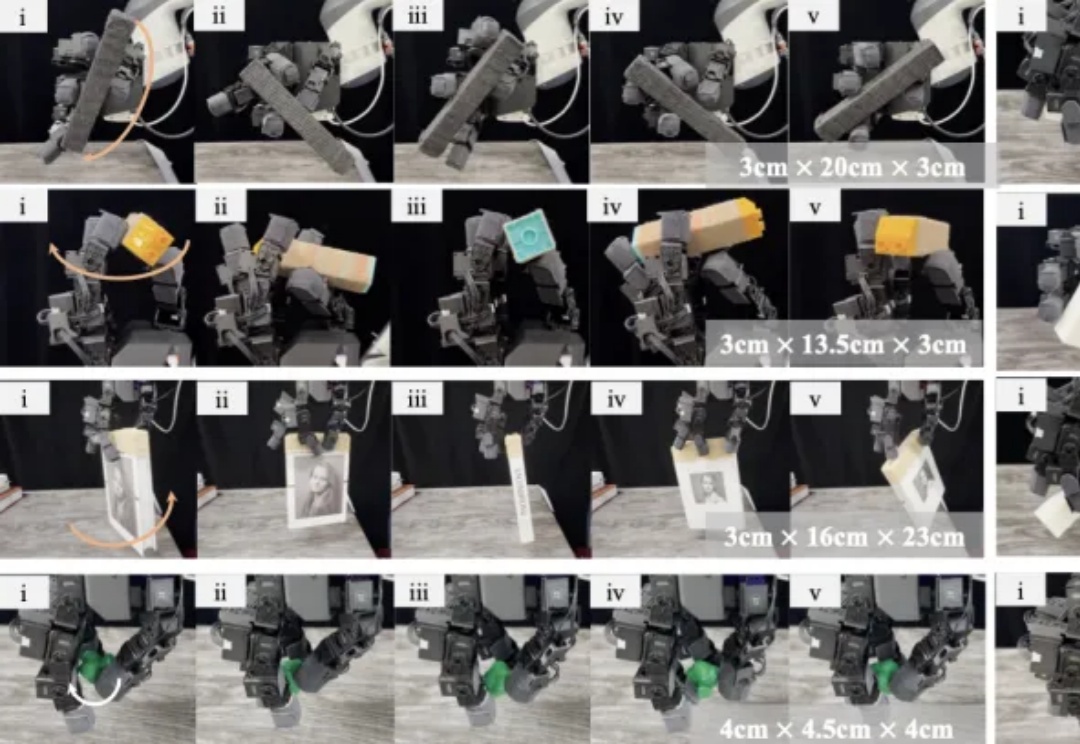
做灵巧手如果不会用工具,跟咸鱼(夹爪)有什么区别?
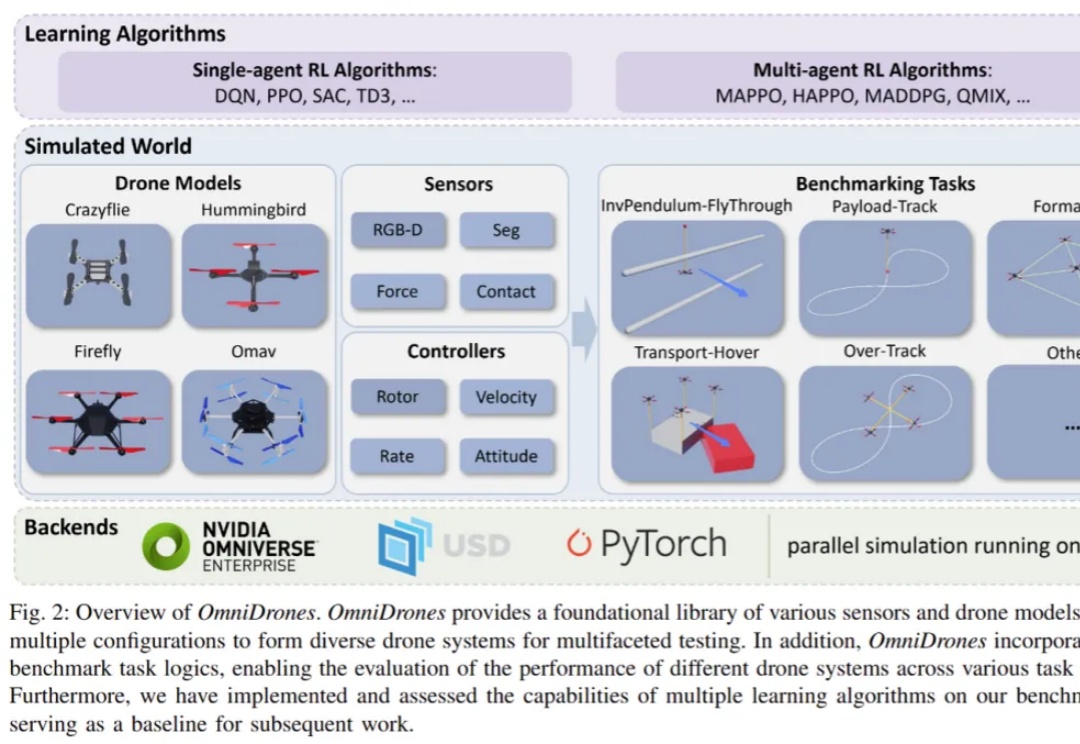
控制无人机执行敏捷、高机动性的行为是一项颇具挑战的任务。传统的控制方法,比如 PID 控制器和模型预测控制(MPC),在灵活性和效果上往往有所局限。而近年来,强化学习(RL)在机器人控制领域展现出了巨大的潜力。通过直接将观测映射为动作,强化学习能够减少对系统动力学模型的依赖。
中国科学院大学和中科数字大脑研究院的研究人员,引入了上帝之点和死亡之点,构建了智能体演化的动力学模型——Flight Model。他们发现,以GPT-4为代表的AI已经接近了人类成人智能水平,但尚未表现出自我意识证据。并且,具有自我意识到AGI,在科学原理上存在目前无法克服的局限性。