突破开放世界移动操作!首个室内移动抓取多模态智能体亮相,微调模型真实环境零样本动作准确率达 90%
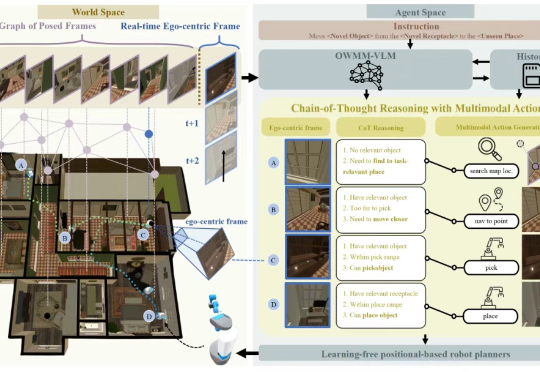
突破开放世界移动操作!首个室内移动抓取多模态智能体亮相,微调模型真实环境零样本动作准确率达 90%在家庭服务机器人领域,如何让机器人理解开放环境中的自然语言指令、动态规划行动路径并精准执行操作,一直是学界和工业界的核心挑战。
来自主题: AI技术研报
7962 点击 2025-06-21 16:56
 搜索
搜索
在家庭服务机器人领域,如何让机器人理解开放环境中的自然语言指令、动态规划行动路径并精准执行操作,一直是学界和工业界的核心挑战。