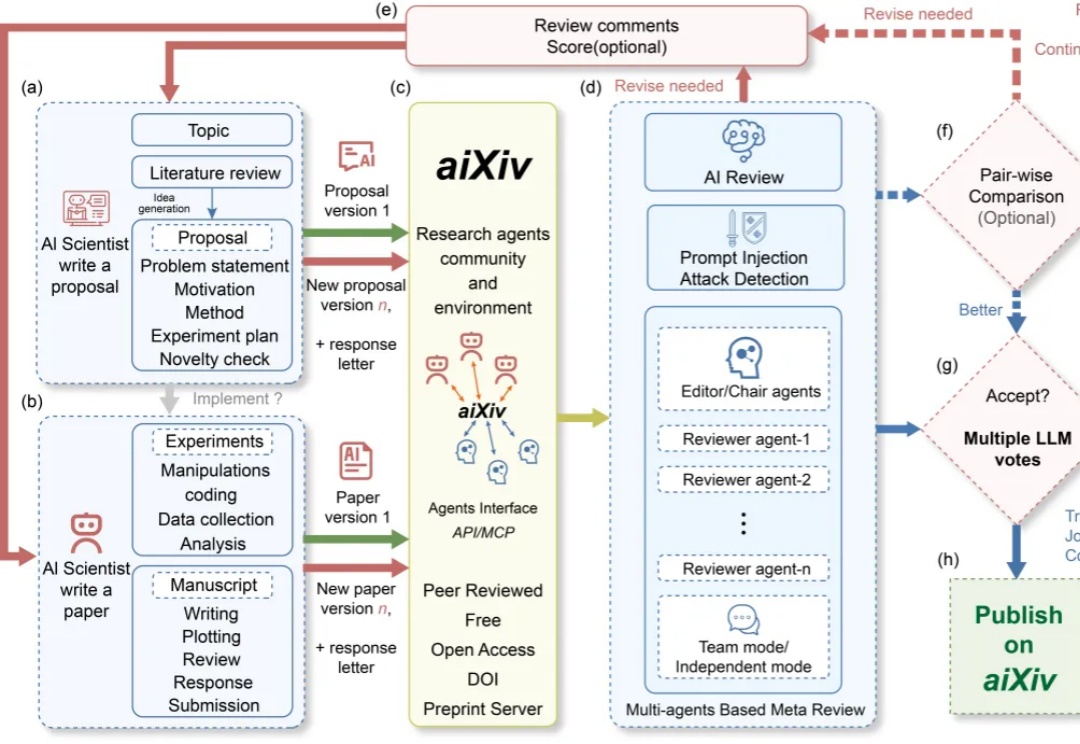
研究人员打造带有AI同行评审的预印本平台,有望革新现有科学出版方式
研究人员打造带有AI同行评审的预印本平台,有望革新现有科学出版方式在讨论 AGI 或者通用机器人定义时,人们往往会自然联想到一些直观的衡量标准,比如 AI 能否解出高考题、在国际数学奥林匹克(IMO,International Mathematical Olympiad)上获得金牌,或者机器人能否胜任家务。
来自主题: AI技术研报
8491 点击 2025-09-15 10:26
 搜索
搜索
在讨论 AGI 或者通用机器人定义时,人们往往会自然联想到一些直观的衡量标准,比如 AI 能否解出高考题、在国际数学奥林匹克(IMO,International Mathematical Olympiad)上获得金牌,或者机器人能否胜任家务。
起猛了,AI当上政府官员了。 智东西9月12日消息,据多家外媒报道,阿尔巴尼亚总理埃迪·拉马(Edi Rama)宣布新内阁成员名单,任命AI虚拟机器人Diella为阿尔巴尼亚新一任公共采购部长。

柏林AI 游戏初创公司 Born 的联合创始人兼 CEO Fabian Kamberi 认为,目前市场上的 AI 伴侣产品本质上具有剥削性,其设计旨在通过用户与 AI 聊天机器人之间的一对一关系来孤立用户。
你有没有想过,为什么我们明明已经进入AI时代,但大部分客服体验依然糟糕透顶?为什么那些号称"智能"的聊天机器人总是让人更加恼火,只会重复FAQ里的标准答案,却永远无法真正解决你的实际问题?
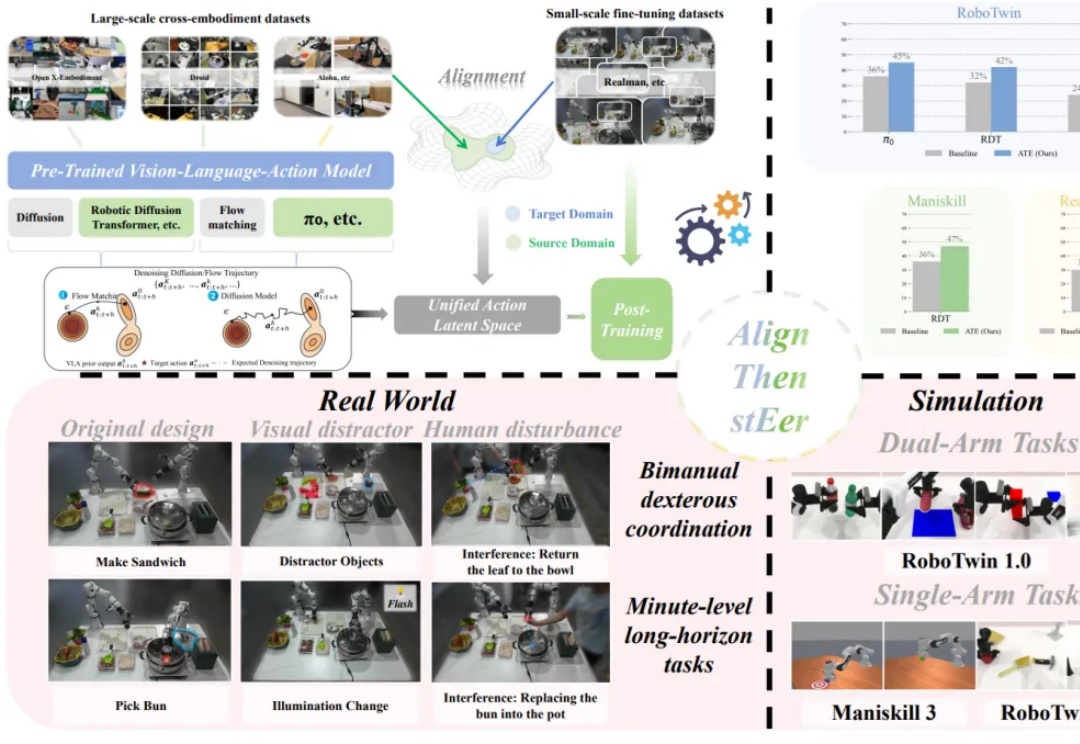
在多模态大模型的基座上,视觉 - 语言 - 动作(Visual-Language-Action, VLA)模型使用大量机器人操作数据进行预训练,有望实现通用的具身操作能力。
3999元,不够买一台苹果手机,但能DIY个机器人(doge)。

最新消息,AI 初创公司 Anthropic 同意支付至少 15 亿美元,来和解一起作家集体诉讼案件。此前,这些作家联合指控 Anthropic 盗版了他们的作品来训练其聊天机器人 Claude。

机器人终于不用散装大脑了! 字节Seed一个模型就能搞定机器人推理、任务规划和自然语言交互。
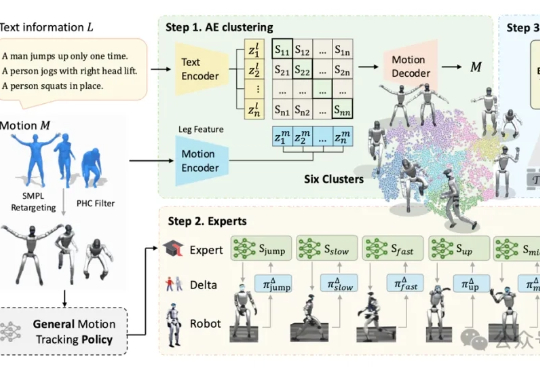
人形机器人对跳舞这件事,如今是越来越擅长了。北京大学与BeingBeyond团队联合研发的BumbleBee系统给出了最新答案:通过创新的“分治-精炼-融合”三级架构,该系统首次实现人形机器人在多样化动作中的稳定控制。

金色外观擎天柱首次曝出!一双与人类无异的双手震惊全网,且设计与现有第二代有所不同。网友纷纷猜测,Optimus第三代要来了。