相隔3000英里,用苹果头显遥控机器人!UCSD、MIT华人团队开源TeleVision
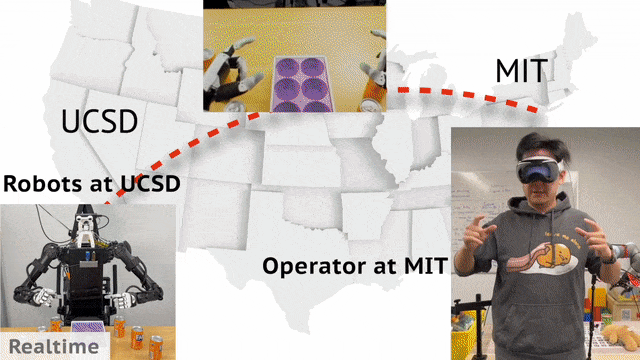
相隔3000英里,用苹果头显遥控机器人!UCSD、MIT华人团队开源TeleVision现实中,机器人收据收集可以通过远程操控实现。来自UCSD、MIT的华人团队开发了一个通用框架Open-TeleVision,可以让你身临其境操作机器人,即便相隔3000英里之外。
来自主题: AI技术研报
9704 点击 2024-07-07 16:55
 搜索
搜索
现实中,机器人收据收集可以通过远程操控实现。来自UCSD、MIT的华人团队开发了一个通用框架Open-TeleVision,可以让你身临其境操作机器人,即便相隔3000英里之外。

一转眼,2024 年已经过半。我们不难发现,AI 尤其是 AIGC 领域出现一个越来越明显的趋势:文生图赛道进入到了稳步推进、加速商业落地的阶段,但同时仅生成静态图像已经无法满足人们对生成式 AI 能力的期待,对动态视频的创作需求前所未有的高涨。

大模型当上福尔摩斯,学会对视频异常进行检测了。 来自华中科技大学、百度、密歇根大学的研究团队,提出了一种可解释性的视频异常检测框架,名为Holmes-VAD。

该文章的作者团队来自于斯坦福大学,共同第一作者团队Mert Yuksekgonul,Federico Bianchi, Joseph Boen, Sheng Liu, Zhi Huang
为了让大模型在特定任务、场景下发挥更大作用,LoRA这样能够平衡性能和算力资源的方法正在受到研究者们的青睐。
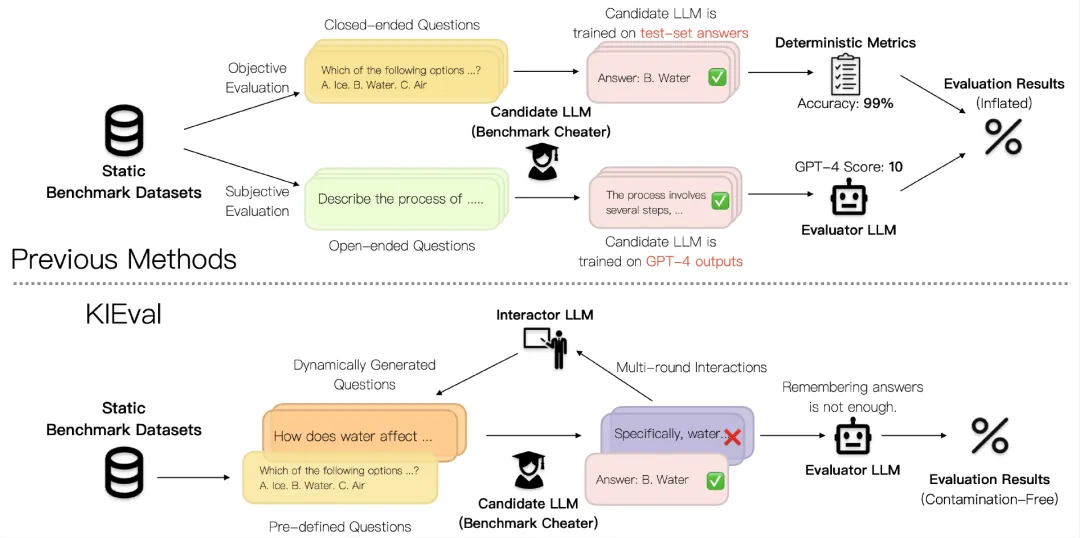
当前大语言模型(LLM)的评估方法受到数据污染问题的影响,导致评估结果被高估,无法准确反映模型的真实能力。北京大学等提出的KIEval框架,通过知识基础的交互式评估,克服了数据污染的影响,更全面地评估了模型在知识理解和应用方面的能力。
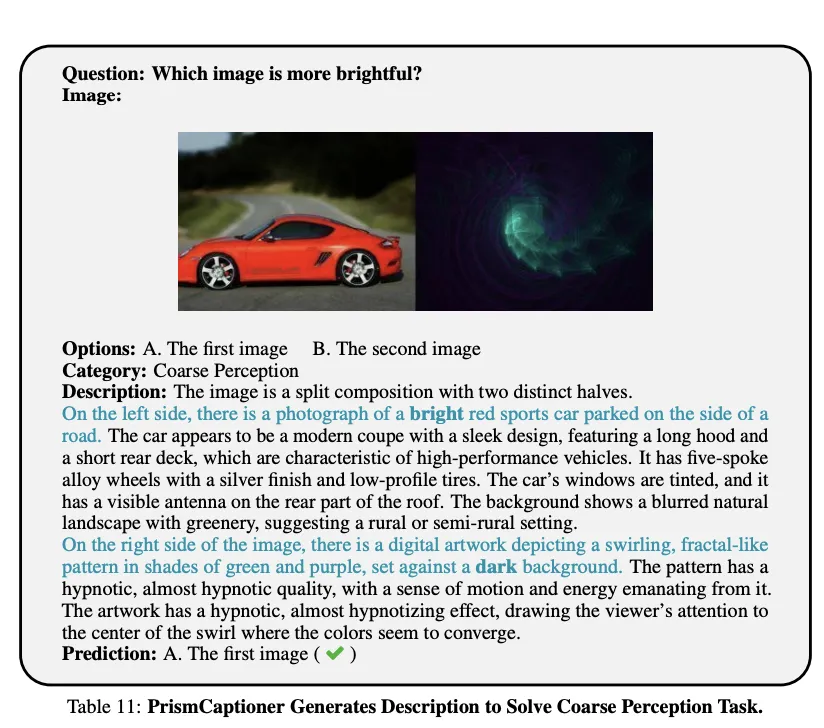
只要把推理和感知能力拆分,2B大模型就能战胜20B?!
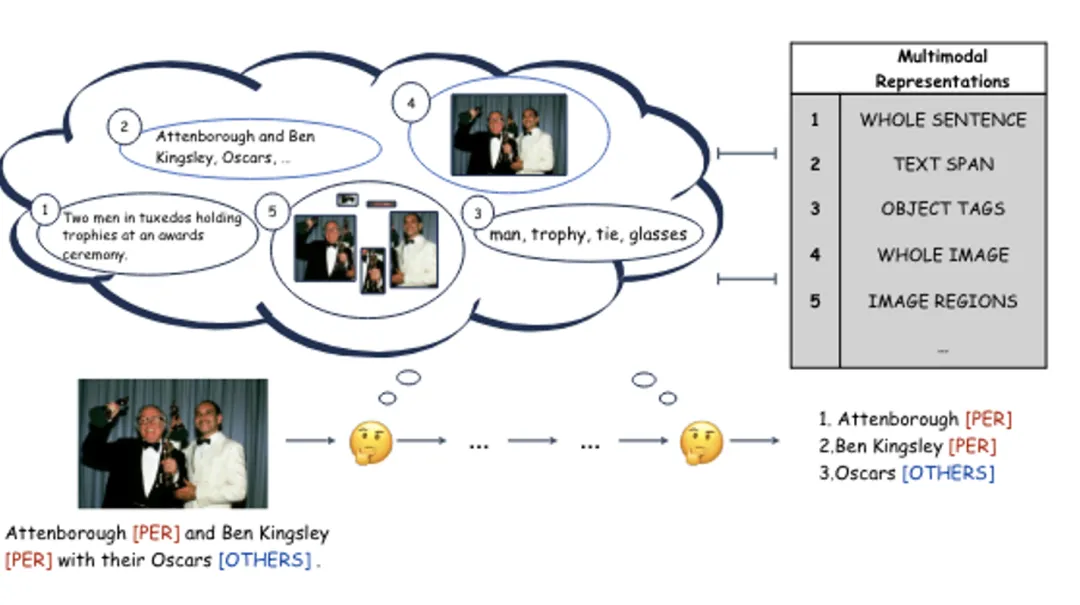
多模态命名实体识别,作为构建多模态知识图谱的一项基础而关键任务,要求研究者整合多种模态信息以精准地从文本中提取命名实体。尽管以往的研究已经在不同层次上探索了多模态表示的整合方法,但在将这些多模态表示融合以提供丰富上下文信息、进而提升多模态命名实体识别的性能方面,它们仍显不足。

多件衣服按指定穿法一键虚拟试穿!
只要将注意力切块,就能让大模型解码提速20倍。