动作波动率降低70%!清华发布工业控制专用神经网络模型 | TIV'25
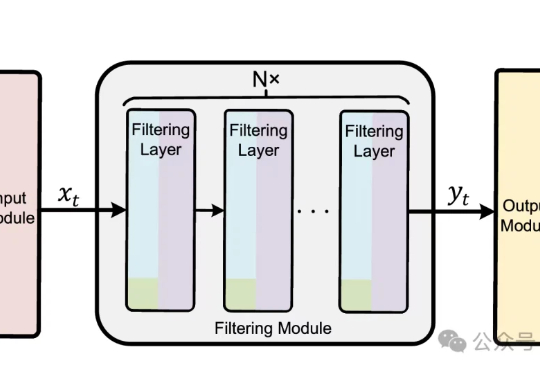
动作波动率降低70%!清华发布工业控制专用神经网络模型 | TIV'25在机器人与自动驾驶领域,由强化学习训练的控制策略普遍存在控制动作不平滑的问题。这种高频的动作震荡不仅会加剧硬件磨损、导致系统过热,更会在真实世界的复杂扰动下引发系统失稳,是阻碍强化学习走向现实应用的关键挑战。
来自主题: AI技术研报
9029 点击 2025-10-18 11:54
 搜索
搜索
在机器人与自动驾驶领域,由强化学习训练的控制策略普遍存在控制动作不平滑的问题。这种高频的动作震荡不仅会加剧硬件磨损、导致系统过热,更会在真实世界的复杂扰动下引发系统失稳,是阻碍强化学习走向现实应用的关键挑战。

刚刚,加州大学洛杉矶分校(UCLA)副教授周博磊官宣加入机器人初创公司 Coco Robotics,专注于人行道自动驾驶这一难题!

面向自动驾驶的多模态大模型在 “推理链” 上多以文字或符号为中介,易造成空间 - 时间关系模糊与细粒度信息丢失。FSDrive(FutureSightDrive)提出 “时空视觉 CoT”(Spatio-Temporal Chain-of-Thought),让模型直接 “以图思考”,用统一的未来图像帧作为中间推理步骤,联合未来场景与感知结果进行可视化推理。
从重庆魔幻山城到全球Robotaxi布局,千里科技展现出将AI融入物理世界的雄心。董事长印奇的「千里计划」——One Brain, One OS, One Agent——勾勒出跨场景智能生态,让汽车成为高效、安全的现实世界入口和未来的人类伙伴。

由华中科技大学与小米汽车提出了业内首个无需 OCC 引导的多模态的图像 - 点云联合生成框架 Genesis。该算法只需基于场景描述和布局(包括车道线和 3D 框),就可以生成逼真的图像和点云视频。

机器之心报道 编辑:+0 自动驾驶有 L1-L5 的分级路径,现在教育 AI 也有了自己的版本。 如今,「AI 下半场」已成共识,应用落地正成为决定未来的关键。教育,作为关乎人类发展的根本基石,已然成
Wayve,一家总部位于英国的无人驾驶初创公司,有望凭一己之力拿到其中的五分之一。该公司日前宣布,已与英伟达签署意向书,后者将在其下一轮融资中“评估 5 亿美元的投资”。同时,Wayve 即将推出的 Gen 3 硬件平台,将完全基于英伟达的 DRIVE AGX Thor 车载计算平台打造。
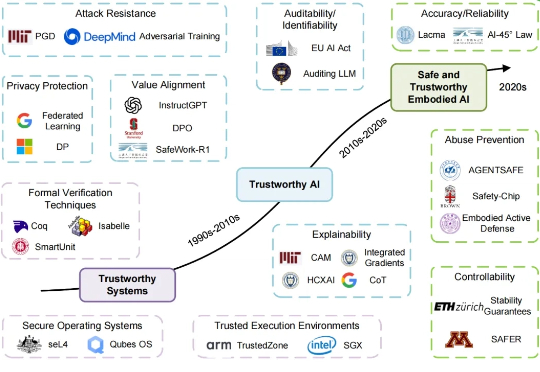
近年来,以人形机器人、自动驾驶为代表的具身人工智能(Embodied Artificial Intelligence, EAI)正以前所未有的速度发展,从数字世界大步迈向物理现实。然而,当一次错误的风险不再是屏幕上的一行乱码,而是可能导致真实世界中的物理伤害时,一个紧迫的问题摆在了我们面前: 如何确保这些日益强大的具身智能体是安全且值得信赖的?
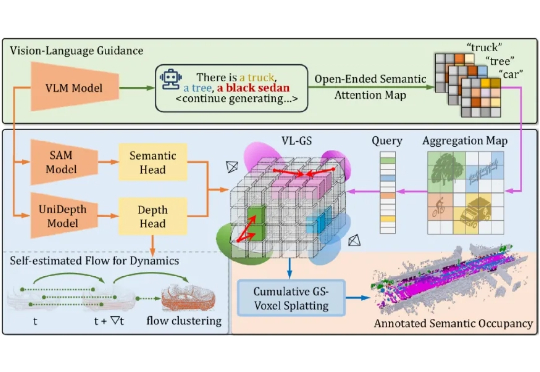
本文介绍了来自北京大学王选计算机研究所王勇涛团队及合作者的最新研究成果 AutoOcc。针对开放自动驾驶场景,该篇工作提出了一个高效、高质量的 Open-ended 三维语义占据栅格真值标注框架,无需任何人类标注即可超越现有语义占据栅格自动化标注和预测管线,并展现优秀的通用性和泛化能力,论文已被 ICCV 2025 录用为 Highlight。
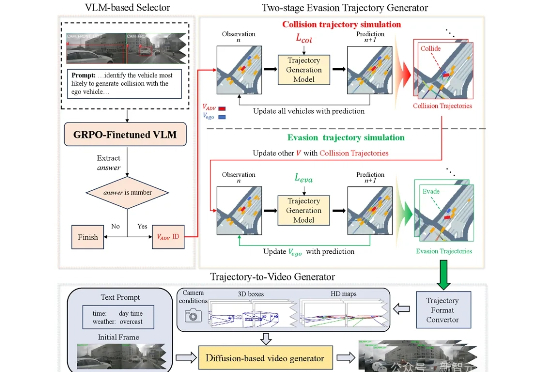
浙江大学与哈工大(深圳)联合推出SafeMVDrive,利用扩散模型结合VLM实现批量化多视角真实域的安全关键视频生成。该方法在保持画质与真实感的同时,显著增强了驾驶场景的危险性。生成的场景用于端到端自动驾驶系统的极限压测,可使得模型的碰撞率提升50倍。