# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
英伟达不造机器人,但要帮具身企业造好机器人(doge)
刚刚,在芝加哥Automate 2026大会上,英伟达发布了Halos for Robotics——
一套覆盖芯片、传感器、操作系统到安全认证的全栈机器人安全系统。
Halos最大的特点,是把英伟达过去在自动驾驶领域超过18600工程人年的安全积累和700万行经过验证的代码,搬到了机器人赛道,为自主机器人提供统一的安全架构。
有了它,机器人公司不用再从零造轮子,接入即可使用。更关键的是,Halos的核心安全框架已经开源,向行业开放。
可以说,如果特斯拉做具身智能走的是iOS路线,自己造机器人、自己做安全,那么英伟达选的就是安卓路线,把安全平台开放给所有人。
值得一提的是,目前已经有不少公司入伙Halos生态,成为首批合作伙伴,包括人形机器人公司Agility、波士顿动力、激光雷达厂商禾赛科技、安全机器人公司FORT Robotics等,整体生态已经扩展到43家往上。
其中,Agility已经率先吃上“螃蟹”,将Halos整合进自家的Digit机器人,在亚马逊、GXO、丰田的工厂里持证上岗。
视频里这个穿着安全背心的机器人,正穿梭在工厂传送带之间,承担搬运和物流等实际工作。
那这个新的安全系统Halos到底是个什么东西?
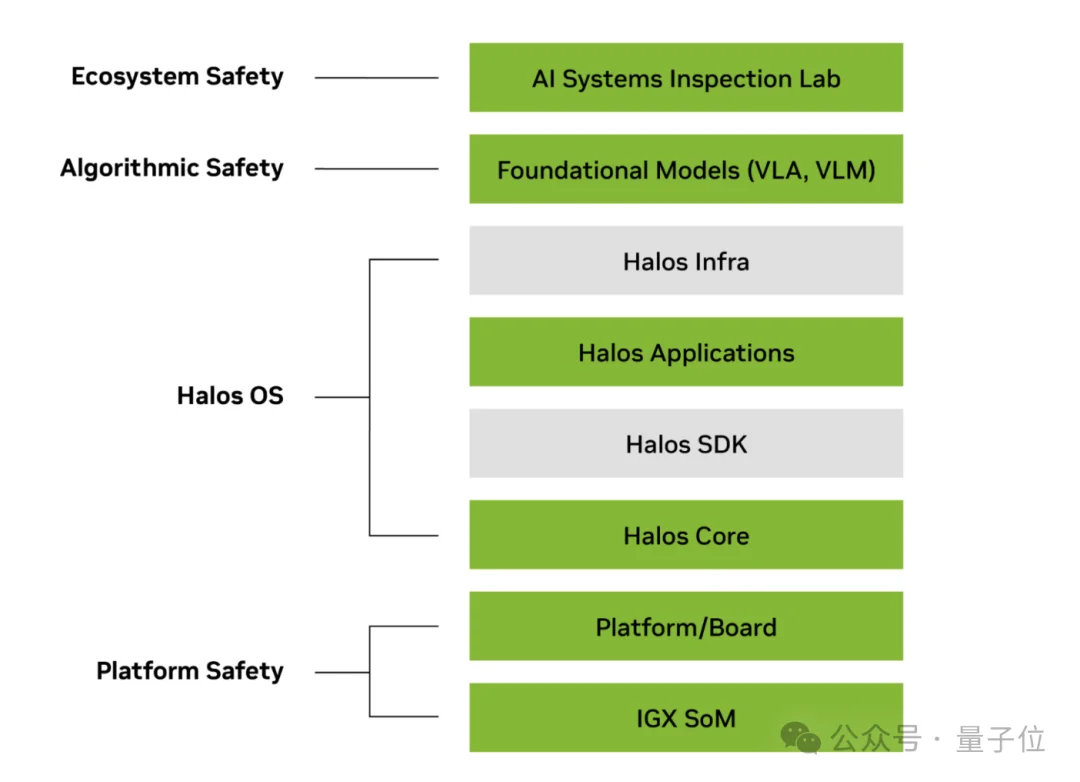
按照英伟达官方的架构,Halos可以分成四层,从下到上分别是:平台安全、安全操作系统、算法安全和生态安全。
这四层其实对应的是同一个问题的四个维度——
机器人在现实世界运行时,可能出错的四个来源:硬件、软件系统、模型决策,以及外部认证与生态。
首先是平台安全,解决底层硬件不能失控。
英伟达在这一层拿出了IGX Thor,一颗面向机器人与工业场景的AI计算平台。
它内部设置了一个独立的“安全岛”,拥有独立的处理器、I/O、电源和时钟,与主计算系统物理隔离。
即使主AI系统崩溃、重启甚至异常运行,安全岛仍然可以独立执行紧急制动等关键功能。
这有点像飞机的备用系统,当主系统失效时,备用系统仍然能接管控制。
同一层还有Holoscan Sensor Bridge,用来解决另一个关键问题:传感器异构带来的延迟与错配。
机器人通常同时搭载激光雷达、深度相机、IMU、力矩传感器等设备,但这些设备来自不同厂商、运行在不同协议上。
如果数据需要层层排队处理,就可能在几十毫秒内错过安全窗口。
Sensor Bridge的作用,是把所有传感器数据统一接入安全计算域,实现低延迟同步处理,并达到SIL 2级安全保证。

第二层:安全操作系统,解决“系统本身会不会出错”
如果说第一层管“硬件不崩”,这一层管的是“系统不乱”。
Halos OS运行在IGX Thor之上,底层是Halos Core,支持两种模式:纯Linux,或者Linux + QNX混合架构。
在后者中,英伟达通过Hypervisor把系统拆成两个隔离域:Linux负责AI计算与应用,QNX负责安全关键任务。两者完全隔离运行。
这意味着即使AI应用层出现异常,也不会影响安全控制逻辑。这一层相当于在“硬件安全岛”之外,再加一层“软件隔离墙”。
在此之上,是安全应用模块,其中最典型的是Outside-In Safety Blueprint。
它的思路是:不只让机器人自己看世界,还引入外部视角。
比如在工厂天花板安装摄像头,由独立AI从第三方视角监控机器人行为。
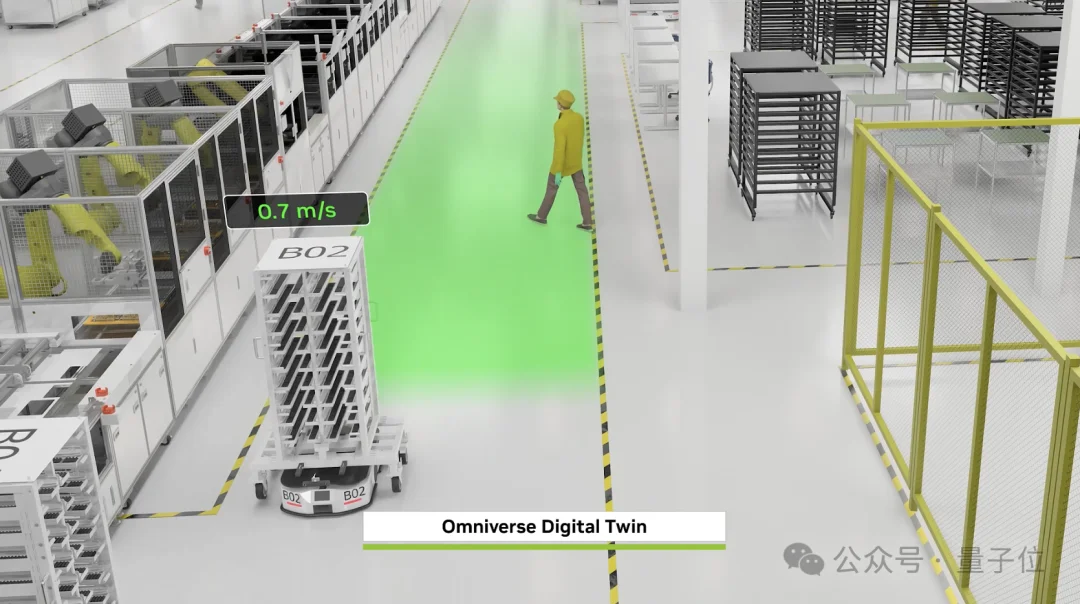
在一个具体场景中,自主叉车在拖车内作业时,车载传感器容易误判空间边界,导致频繁急停。
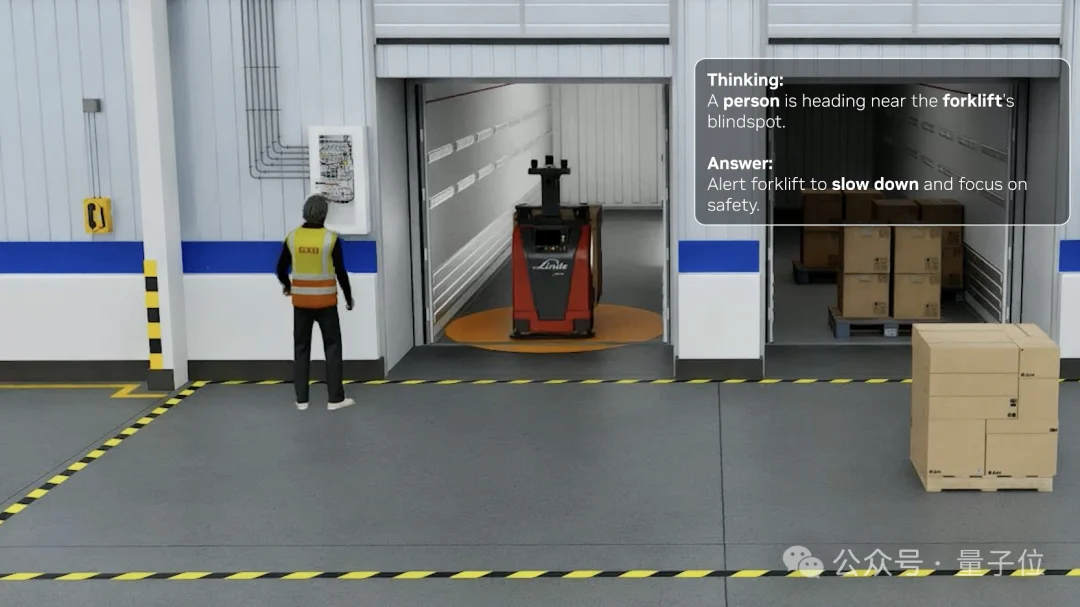
而Outside-In系统可以在确认环境安全时允许更高效率运行,一旦有人进入危险区域,再立即接管干预。
这一能力目前已向开发者开放,并以开源形式提供。
第三层:算法安全,解决“AI本身会不会判断错”
前两层保证的是“系统可靠”,但机器人真正的风险,其实来自更上层——模型本身。
无论是VLA(视觉语言动作模型)还是VLM(视觉语言模型),它们的决策都可能出错。
例如把纸箱误判为人,或者把人误判为障碍物。这类错误不是系统崩溃,而是“理解错误”。
算法安全这一层的目标,就是评估并约束模型在物理世界中的行为安全性,确保错误不会转化为危险动作。
第四层:生态安全,解决“谁来认证、谁来负责”
最上层是生态安全,负责把整套体系变成“行业标准”。
英伟达建立了Halos AI Systems Inspection Lab,并获得全球首个物理AI领域的ISO/IEC 17020检测资质。TÜV Rheinland、TÜV SÜD、UL Solutions、SGS、exida、CertX等认证机构均认可其检测结果。
这意味着机器人公司可以先在英伟达完成预检,再进入正式认证流程,大幅降低时间和成本。
过去,这一环节是碎片化的:传感器、控制器、视觉系统各自认证、各自标准,企业需要自己拼装并重新认证。
而Halos第一次把从芯片、系统、模型到认证的流程,统一进一个体系中。
相信不少朋友在看到这条新闻时,都会冒出一个相似的疑问:
为什么工业机器人已经好好地用了几十年,英伟达却偏偏在2026年专门发布一套机器人安全系统?
原因很简单,因为现在的具身智能机器人正在从实验室走向真实世界的工业场景。
在过去,工业机械臂被固定在工作站内,动作轨迹提前编程好,人和机器之间由护栏隔离,安全主要依赖物理边界。
但现在,新一代机器人开始进入工厂、仓库甚至办公室,与人类共享同一个空间。
与此同时,驱动它们的也不再是固定规则,而是具身基础模型、分布式传感器与实时决策系统。
这带来的变化是:机器人不再是“确定性执行器”,而变成了“带不确定性的自主体”。
即便在工厂这种高度结构化的环境中,不同机器人之间的协作、物料流动、产线布局变化,以及对周围环境的部分不可观测性,都会不断引入新的风险变量。
这使得“安全”不再只是机械隔离问题,而变成了系统级问题。
对于安全性之于机器人进工厂的必要性,Agility CEO Peggy Johnson也是表示:
人形机器人要大规模创造价值,安全必须内建在机器人里,并且在整个系统层面得到验证。这不是可选项,而是人形机器人进入工业流程的前提条件。
英伟达机器人与边缘AI副总裁Deepu Talla的判断则更进一步:
如果机器人要规模化部署到工厂、仓库和物流环境,行业需要一套统一的安全架构。
换句话说。机器人行业今天遇到的问题,和十几年前自动驾驶很像——模型越来越聪明,但真正决定能不能落地的,往往不是模型本身,而是安全。
而Halos,正是英伟达给出的答案。
说到最后,英伟达的机器人全栈布局,其实已经成型了。

如果把这套体系拆开来看,大致可以分成四层:训练、仿真、模型与推理。
从训练到仿真,从模型到部署推理,整条技术链路的每一层,都有英伟达的产品在覆盖。
而现在,Halos补上了最后一块拼图:安全与准入。
一旦这套流程走完,机器人几乎就被完整地嵌入了这条技术栈之中。
如果再更换任何一层(尤其是安全与认证体系),都意味着要重新走一遍验证流程,时间与成本都会重新沉没。
于是局面也变得很明朗:英伟达不造机器人,但它已经在从硅片到仿真、从模型到安全认证的每一层留下自己的接口。
这不只是“帮你造好机器人”,更像是在定义——
机器人该怎么被造出来。
参考链接
[1]https://nvidianews.nvidia.com/news/nvidia-announces-halos-for-robotics-the-industrys-first-full-stack-safety-system-for-physical-ai
[2]https://www.nvidia.com/en-us/ai-trust-center/halos/robotics/
[3]https://developer.nvidia.com/blog/inside-nvidia-halos-for-robotics-a-full-stack-functional-safety-system-for-physical-ai/
文章来自于"量子位",作者 "henry"。



