# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
物体姿态估计对于各种应用至关重要,例如机器人操纵和混合现实。实例级方法通常需要纹理 CAD 模型来生成训练数据,并且不能应用于测试时未见过的新物体;而类别级方法消除了这些假设(实例训练和 CAD 模型),但获取类别级训练数据需要应用额外的姿态标准化和检查步骤。
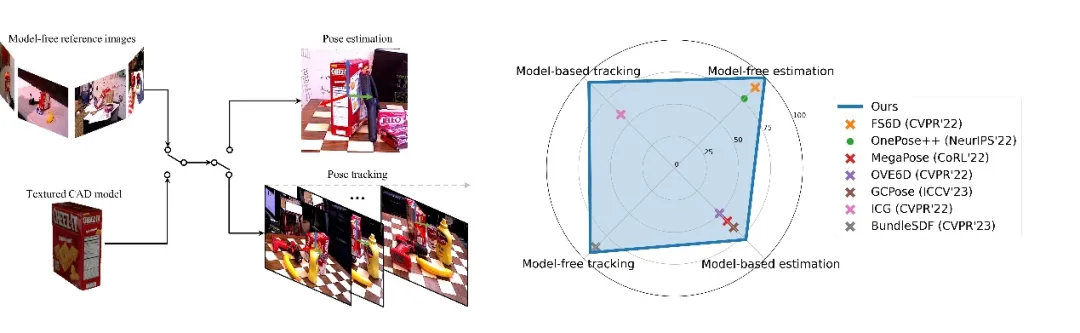
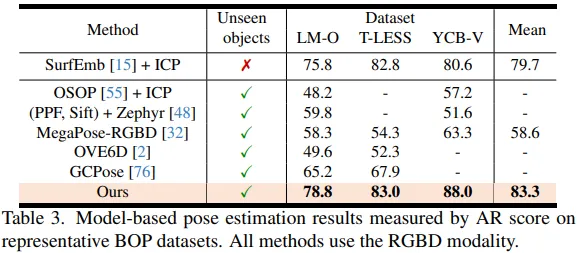
为了解决这些问题,来自英伟达的研究团队提出了一个统一的框架,称为 FoundationPose,它在基于模型和无模型设置下,使用 RGBD 图像对新颖物体进行姿态估计和跟踪。如下图所示,FoundationPose 优于现有专门针对这四项任务中每一项的 SOTA 方法。FoundationPose 通过大规模合成训练实现了强大的泛化能力,辅以大型语言模型(LLM)、以及一种新颖的基于 Transformer 的架构和对比学习。该研究利用神经隐式表示填补了基于模型和无模型设置之间的差距,使得 FoundationPose 可以使用少量(约 16 张)参考图像进行有效的新颖视图合成,实现了比之前的渲染与比较方法 [32, 36, 67] 更快的渲染速度。研究论文被评为 CVPR 2024 满分论文,代码已开源。

04:12总的来说,该研究的主要贡献包括:
FoundationPose 是一个用于 6D 物体姿态估计和跟踪的统一大模型,支持基于模型和无模型设置。该方法可以立即应用于新颖的物体上,无需微调,只要给出其 CAD 模型,或者拍摄少量参考图像即可。FoundationPose 通过神经隐式表示来弥合这两种设置之间的差距,这种表示允许有效的新视图合成,并在同一统一框架下保持下游姿态估计模块的不变性。
通过大规模合成训练、大型语言模型(LLM)、一种新颖的基于 Transformer 的架构和对比学习公式的辅助,FoundationPose 实现了强大的泛化能力。在涉及挑战性场景和物体的多个公共数据集上进行了广泛评估,结果表明 FoundationPose 在性能上大幅优于现有的针对每个任务专门化的方法。此外,尽管减少了假设,但 FoundationPose 达到了与实例级方法相当的结果。
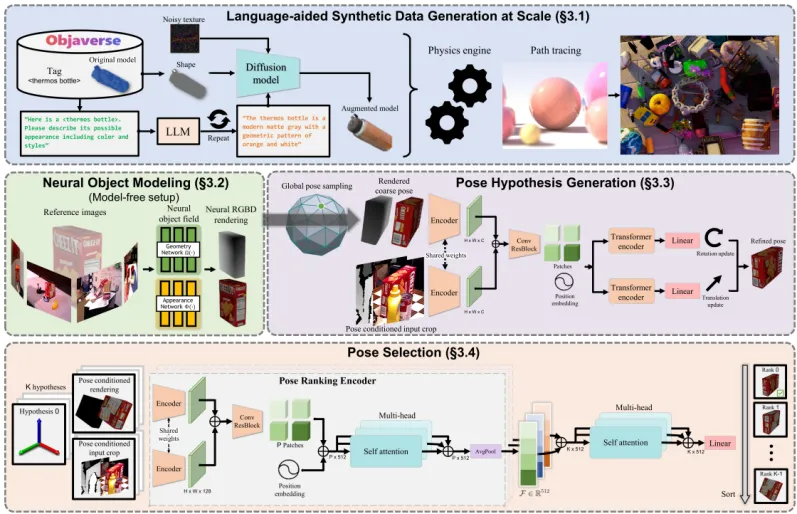
FoundationPose的框架概述如下图所示,为了减少大规模训练的手动工作,该研究利用最近出现的技术和资源,包括 3D 模型数据库、大型语言模型和扩散模型,开发了一种新颖的合成数据生成流程。为了弥合无模型和基于模型的设置之间的差距,该研究利用一个以物体为中心的神经场进行新颖视图的 RGBD 渲染,以便后续进行渲染与比较。对于姿态估计,该研究首先在物体周围均匀初始化全局姿态,然后通过精细化网络对其进行改进,最后将改进后的姿态传递给姿态选择模块,该模块预测它们的得分。具有最佳得分的姿态被选为输出。
为了实现强大的泛化能力,需要大量不同的物体和场景用于训练。在现实世界中获取这样的数据,并标注准确的地面真值 6D 姿态是耗时且成本高昂的。另一方面,合成数据通常缺乏 3D 模型的规模和多样性。该研究开发了一个新颖的合成数据生成流程用于训练,借助了最近出现的资源和技术:大规模 3D 模型数据库 [6, 10],大型语言模型(LLM)和扩散模型 [4, 24, 53]。与之前的工作 [22, 26, 32] 相比,这种方法显著提高了数据量和多样性。
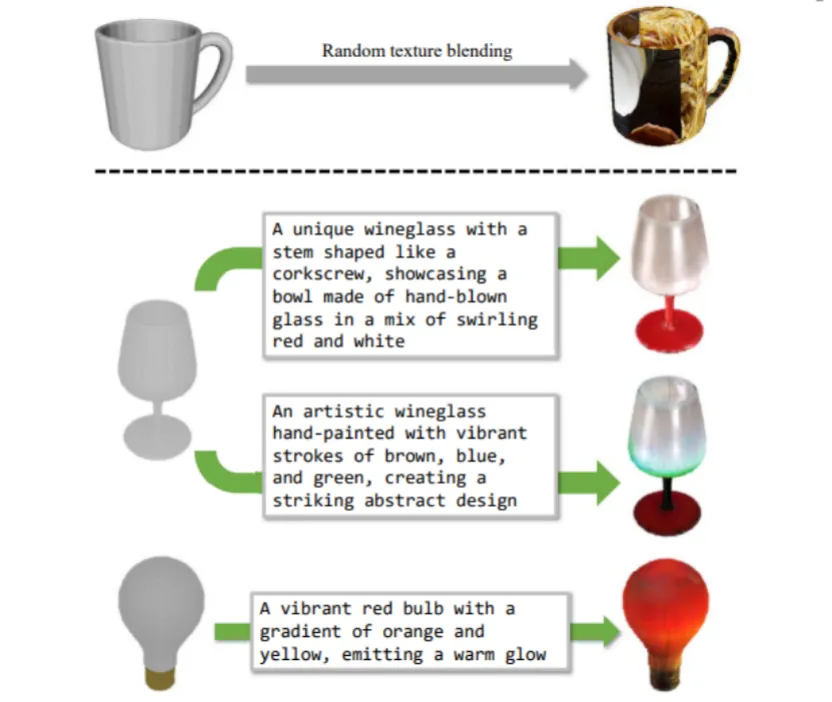
顶部:FS6D [22] 中提出的随机纹理混合。底部:LLM 辅助的纹理增强使外观更加逼真。最左边是原始的 3D 模型。其中文本提示由 ChatGPT 自动生成。
对于无模型设置,当 3D CAD 模型不可用时,一个关键挑战是有效地表示物体,以便为下游模块生成具有足够质量的图像。神经隐式表示对于新颖视图合成和在 GPU 上可并行化均非常有效,因此在为下游姿态估计模块渲染多个姿态假设时提供了高计算效率,如图 2 所示。为此,该研究引入了一个以物体为中心的神经场表示来进行物体建模,灵感来自先前的工作 [45, 65, 71, 74]。一旦训练完成,神经场可以被用作传统图形管线的替代品,以执行对物体的高效渲染,用于后续的渲染和比较迭代。除了原始 NeRF [44] 中的颜色渲染之外,还需要深度渲染来进行基于 RGBD 的姿态估计和跟踪。
为此,该研究执行 Marching Cubes [41] 来从 SDF 的零级集中提取一个带有纹理的网格,并与颜色投影结合。这只需要为每个物体执行一次。在推断时,给定任意物体姿态假设,然后按照光栅化过程来渲染 RGBD 图像。另外,也可以直接使用神经场做 online 和球追踪 [14] 来渲染深度图像;然而,研究团队发现这样做效率较低,特别是在需要并行渲染大量姿态假设时。
给定 RGBD 图像,可以使用类似于 Mask RCNN [18] 或 CNOS [47] 这样的现成方法来检测物体。该研究使用在检测到的 2D 边界框内位于中位深度处的 3D 点来初始化平移。为了初始化旋转,该研究从以物体为中心的球体上均匀采样 Ns 个视点,相机朝向球心。这些相机姿态还通过 Ni 个离散化的平面旋转进行增强,从而产生 Ns・Ni 个全局姿态初始化,这些姿态被发送到姿态精化器作为输入。姿态精化网络架构如总览图所示。
该研究首先使用单个共享的 CNN 编码器从两个 RGBD 输入分支中提取特征图。特征图被级联起来,通过带有残差连接的 CNN 块进行处理,并通过位置嵌入进行分块化。最后,网络预测平移更新∆t ∈ R^3 和旋转更新∆R ∈ SO (3),每个都由一个 Transformer 编码器 [62] 单独处理,并线性投影到输出维度。更具体地说,∆t 代表了物体在相机坐标系中的平移移动,∆R 代表了物体在相机坐标系中表示的方向更新。在实践中,旋转是用轴 - 角度表示进行参数化的。该研究还尝试了 6D 表示 [78],它达到了类似的结果。然后该研究更新了输入的粗略姿态 [R | t] ∈ SE (3)。

其中 ⊗ 表示在 SO (3) 上的更新。与使用单一的齐次姿态更新不同,这种分离表示在应用平移更新时消除了对更新后方向的依赖性。这统一了相机坐标系中的更新和输入观察,从而简化了学习过程。网络训练由 L2 损失监督:

其中 ¯t 和 R¯ 是地面真实值;w1 和 w2 是平衡损失的权重,根据经验设置为 1。
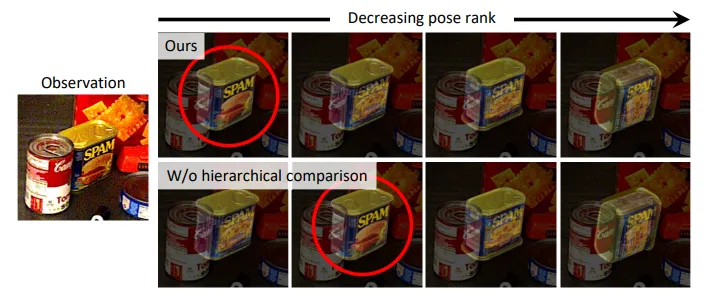
给定一系列经过精化的姿态假设,该研究使用一个分层姿态排名网络来计算它们的得分。得分最高的姿态被选为最终估计值。下图显示姿态排序可视化。该研究提出的分层比较利用了所有姿态假设之间的全局上下文,以更好地预测整体趋势,使形状和纹理都能对齐。真正的最佳姿态用红色圆圈标注。
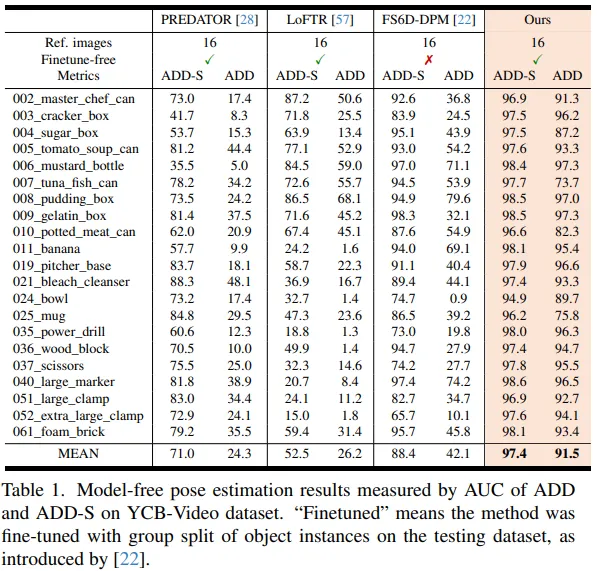
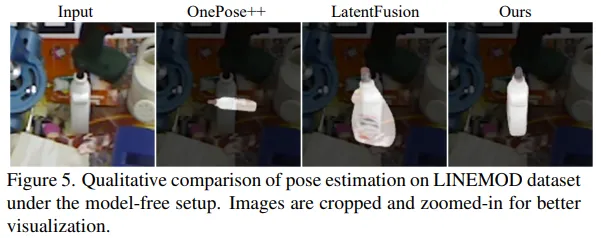
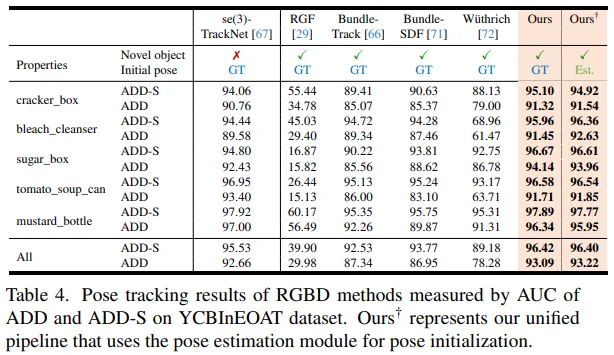
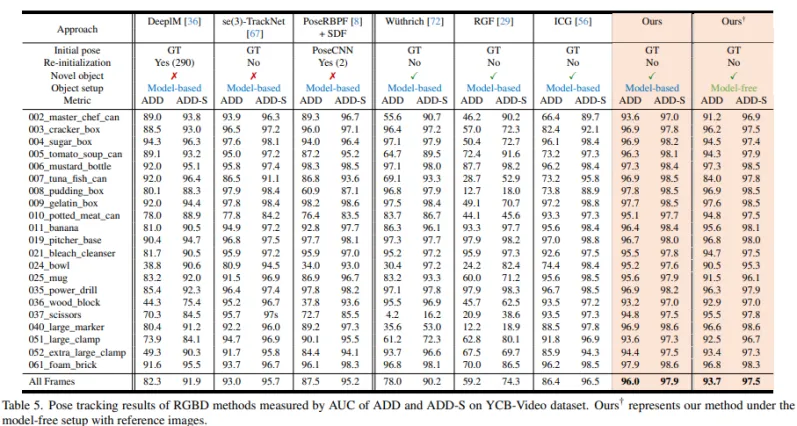
该研究采用 5 个数据集对 FoundationPose 方法进行了实验评估:LINEMOD [23],OccludedLINEMOD [1],YCB-Video [73],T-LESS [25] 和 YCBInEOAT [67]。这些数据集涉及各种具有挑战性的场景(密集杂乱、多实例、静态或动态场景、桌面或机器人操作),以及具有不同属性的物体(无纹理、闪亮、对称、尺寸变化)。
由于 FoundationPose 是一个统一的框架,该研究考虑了两种设置(无模型和基于模型)以及两个姿态预测任务(6D 姿态估计和跟踪)之间的组合,总共有 4 个任务。对于无模型设置,从数据集的训练集中选择了一些捕获新颖物体的参考图像,并配备了物体姿态的地面真值注释,按照 [22] 的方法。对于基于模型的设置,为新颖物体提供了 CAD 模型。

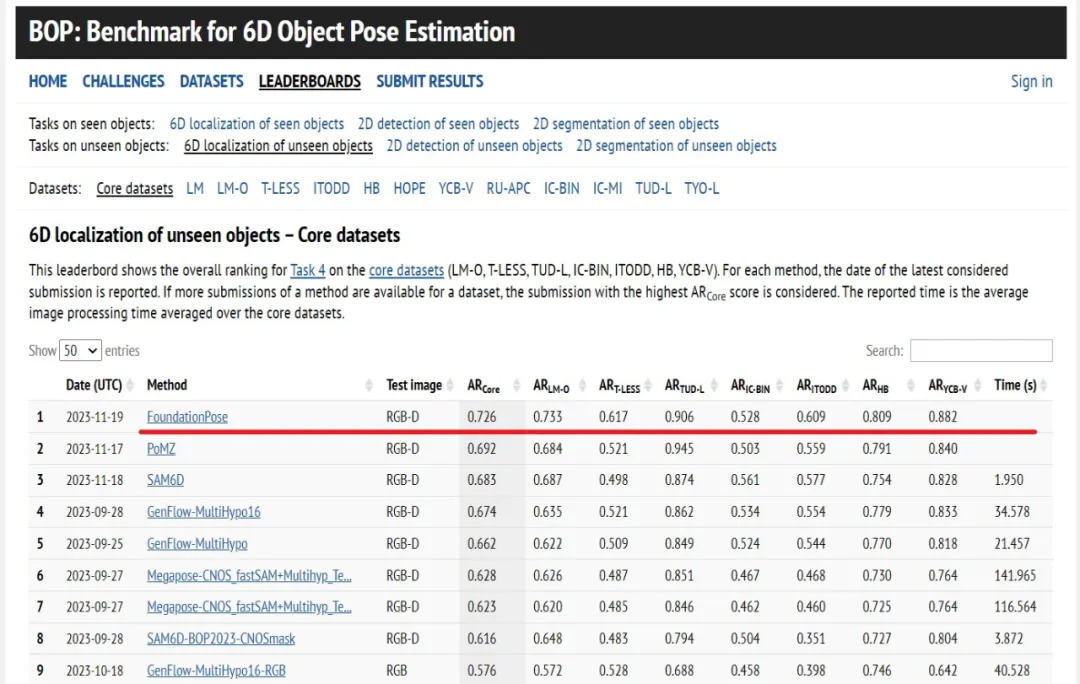
除了消融实验外,在所有评估中,FoundationPose 始终使用相同的训练模型和配置进行推断,而无需任何微调。此外该研究还提交了结果至 BOP 排行榜并取得了第一名的成绩。
该论文来自于英伟达研究院。其中论文一作华人温伯文博士,任研究员。他的研究方向为机器人感知和 3D 视觉,此前曾在谷歌 X、Facebook Reality Labs、亚马逊和商汤实习,获得过 RSS 最佳论文奖提名。

个人主页:https://wenbowen123.github.io/
文章来自微信公众号“机器之心”,作者:机器之心




【开源免费】DeepBI是一款AI原生的数据分析平台。DeepBI充分利用大语言模型的能力来探索、查询、可视化和共享来自任何数据源的数据。用户可以使用DeepBI洞察数据并做出数据驱动的决策。
项目地址:https://github.com/DeepInsight-AI/DeepBI?tab=readme-ov-file
本地安装:https://www.deepbi.com/
【开源免费】airda(Air Data Agent)是面向数据分析的AI智能体,能够理解数据开发和数据分析需求、根据用户需要让数据可视化。
项目地址:https://github.com/hitsz-ids/airda
【开源免费】XTuner 是一个高效、灵活、全能的轻量化大模型微调工具库。它帮助开发者提供一个简单易用的平台,可以对大语言模型(LLM)和多模态图文模型(VLM)进行预训练和轻量级微调。XTuner 支持多种微调算法,如 QLoRA、LoRA 和全量参数微调。
项目地址:https://github.com/InternLM/xtuner
