# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
当前,采用下一 token 预测范式的自回归大型语言模型已经风靡全球,同时互联网上的大量合成图像和视频也早已让我们见识到了扩散模型的强大之处。
近日,MIT CSAIL 的一个研究团队(一作为 MIT 在读博士陈博远)成功地将全序列扩散模型与下一 token 模型的强大能力统合到了一起,提出了一种训练和采样范式:Diffusion Forcing(DF)。
如下所示,扩散强制在一致性和稳定性方面都明显胜过全序列扩散和教师强制这两种方法。
在该框架中,每个 token 都关联了一个随机的、独立的噪声水平,并且可使用一种共享的下一 token 预测模型或下几 token 预测模型根据任意的、独立的、每 token 的方案对 token 进行去噪。
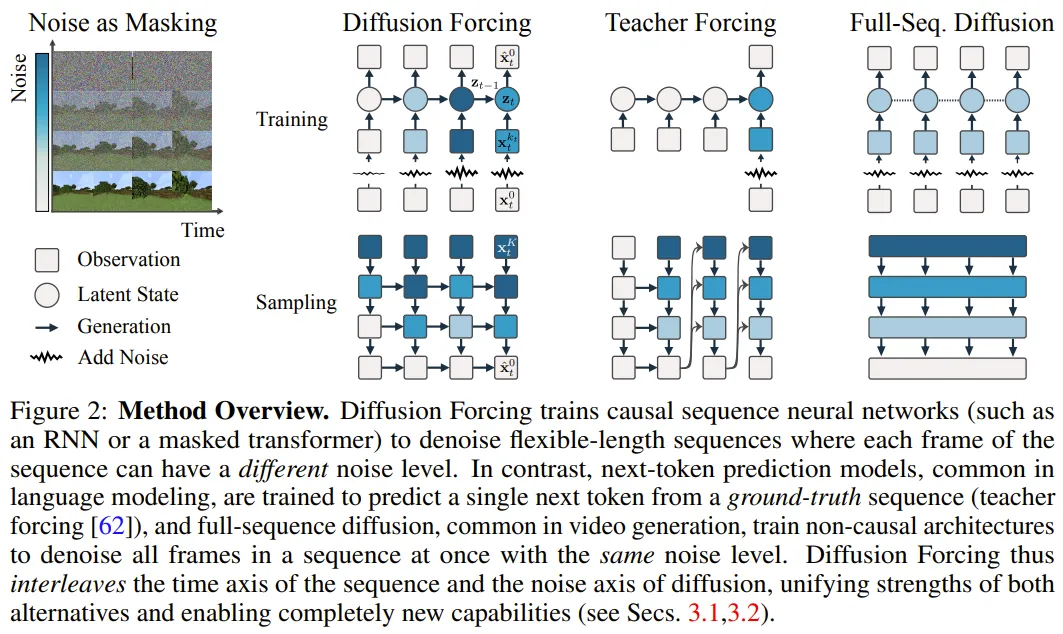
该方法的研究灵感来自这一观察:对 token 加噪声的过程就是一种形式的部分掩码过程 —— 零噪声就意味着未对 token 加掩码,而完整噪声则是完全掩蔽 token。因此,DF 可强迫模型学习去除任何可变有噪声 token 集合的掩码(图 2)。
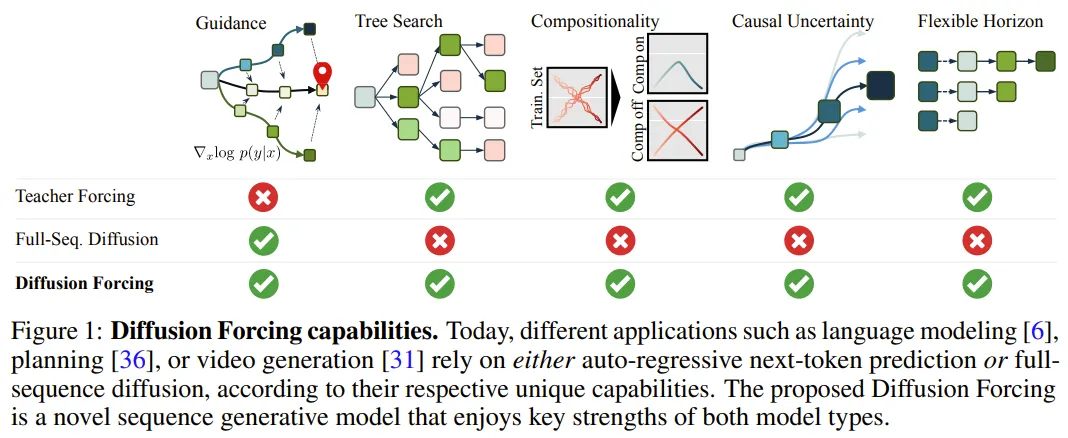
与此同时,通过将预测方法参数化为多个下一 token 预测模型的组合,该系统可以灵活地生成不同长度的序列,并以组合方式泛化到新的轨迹(图 1)。
该团队将用于序列生成的 DF 实现成了因果扩散强制(Causal Diffusion Forcing/CDF),其中未来 token 通过一个因果架构依赖于过去 token。他们训练该模型一次性去噪序列的所有 token(其中每个 token 都有独立的噪声水平)。
在采样期间,CDF 会将一个高斯噪声帧序列逐渐地去噪成洁净的样本,其中不同帧在每个去噪步骤可能会有不同的噪声水平。类似于下一 token 预测模型,CDF 可以生成长度可变的序列;不同于下一 token 预测,CDF 的表现非常稳定 —— 不管是预测接下来的一个 token,还是未来的数千 token,甚至是连续 token。
此外,类似于全序列扩散,它也可接收引导,从而实现高奖励生成。通过协同利用因果关系、灵活的范围和可变噪声调度,CDF 能实现一项新功能:蒙特卡洛树引导(MCTG)。相比于非因果全序列扩散模型,MCTG 能极大提升高奖励生成的采样率。图 1 给出了这些能力的概况。
Diffusion Forcing(扩散强制)
1、将加噪过程视为部分掩码
首先,我们可以将任意 token 集合(不管是否为序列)视为一个通过 t 索引的有序集合。那么,使用教师强制(teacher forcing)训练下一 token 预测便可被解释成掩蔽掉时间 t 的每个 token x_t 基于过去 x_{1:t−1} 预测它们。
对于序列,可将这种操作描述成:沿时间轴执行掩码。我们可以将全序列前向扩散(即逐渐向数据添加噪声的过程)看作一种部分掩码(partial masking),这可被称为「沿噪声轴执行掩码)。
事实上,在 K 步加噪之后,(大概)就是白噪声了,不再有任何有关原数据的信息。
如图 2 所示,该团队建立了一个统一视角来看待沿这两个轴的掩码。
2、扩散强制:不同 token 的噪声水平不同
扩散强制(DF)框架可用于训练和采样任意序列长度的有噪声 token ,其中的关键在于每个 token 的噪声水平 k_t 会随时间步骤而变化。
这篇论文关注的重点是时间序列数据,因此他们通过一种因果架构实例化了 DF,并由此得到了因果扩散强制(CDF)。简单来说,这是使用基础循环神经网络(RNN)获得的一种最小实现。
权重为 θ 的 RNN 维护着获悉过去 token 影响的隐藏状态 z_t,其会通过一个循环层根据动态而演化。当获得输入噪声观察时,就以马尔可夫方式更新该隐藏状态。
当 k_t=0 时,这就是贝叶斯过滤中的后验更新;而当 k_t= K(纯噪声、无信息)时,这就等价于建模贝叶斯过滤中的「后验分布」p_θ(z_t | z_{t−1})。
给定隐藏状态 z_t,观察模型 p_θ(x_t^0 | z_t) 的目标是预测 x_t;这个单元的输入 - 输出行为与标准的条件扩散模型一样:以条件变量 z_{t−1} 和有噪声 token 为输入,预测无噪声的 x_t=x_t^0,并由此间接地通过仿射重新参数化预测噪声 ε^{k_t}。因此,我们就可以直接使用经典的扩散目标来训练(因果)扩散强制。根据噪声预测结果 ε_θ,可以对上述单元进行参数化。然后,通过最小化以下损失来找到参数 θ:

算法 1 给出了伪代码。重点在于,该损失捕获了贝叶斯过滤和条件扩散的关键元素。该团队也进一步重新推断了用于扩散强制的扩散模型训练中的常用技术,详见原论文的附录部分。他们也得出了一个非正式的定理。
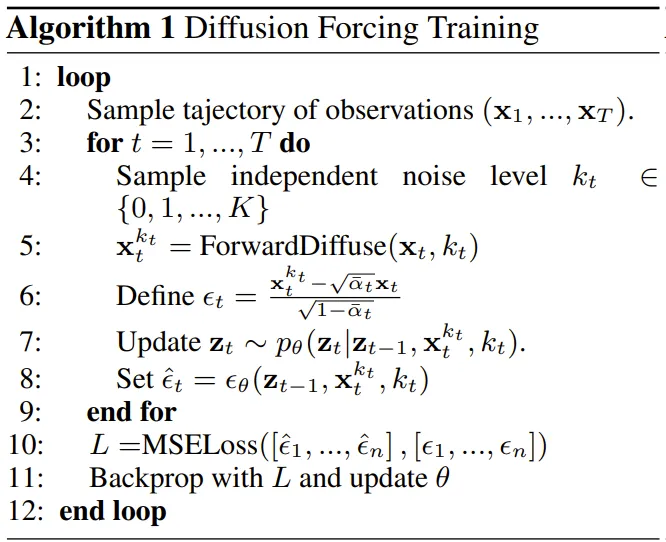
定理 3.1(非正式)。扩散强制训练流程(算法 1)是在期望对数似然上优化证据下限(ELBO)的重新加权,其中期望值会在噪声水平上平均,而是根据前向过程加噪。此外,在适当条件下,优化 (3.1) 式还可以同时最大化所有噪声水平序列的似然下限。
扩散强制采样和所得到的能力
算法 2 描述了采样过程,其定义是:在二维的 M × T 网格 K ∈ [K]^{M×T} 上指定噪声调度;其中列对应于时间步骤 t,m 索引的行则决定了噪声水平。
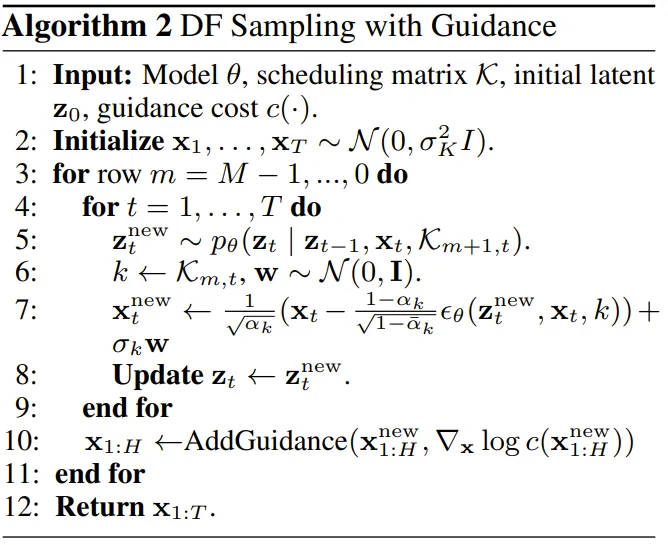
为了生成长度为 T 的整个序列,先将 token x_{1:T} 初始化为白噪声,对应于噪声水平 k = K。然后沿着网格逐行向下迭代,并从左到右逐列去噪,直到噪声水平达到 K。到最后一行 m = 0 时,token 的噪声已清理干净,即噪声水平为 K_{0,t} ≡ 0。
这个采样范式会带来如下新能力:
将扩散强制用于灵活的序列决策
扩散强制的新能力也带来了新的可能性。该团队基于此为序列决策(SDM)设计了一种全新框架,并且将其成功应用到了机器人和自主智能体领域。
首先,定义一个马尔可夫决策过程,该过程具有动态 p (s_{t+1}|s_t, a_t)、观察 p (o_t|s_t) 和奖励 p (r_t|s_t, a_t)。这里的目标是训练一个策略 π(a_t|o_{1:t}),使得轨迹 的预期累积奖励最大化。这里分配 token x_t = [a_t, r_t, o_{t+1}]。一条轨迹就是一个序列 x_{1:T},其长度可能是可变的;训练方式则如算法 1 所示。
在执行过程的每一步 t,都有一个隐藏状态 z_{t-1} 总结过去的无噪声 token x_{1:t-1}。基于这个隐藏状态,根据算法 2 采样一个规划,其中包含预测的动作、奖励和观察。H 是一个前向观察窗口,类似于模型预测控制中的未来预测。在采用了规划的动作之后,环境会得到一个奖励和下一个观察,从而得到下一个 token。其中隐藏状态可以根据后验 p_θ(z_t|z_{t−1}, x_t, 0) 获得更新。
该框架既可以作为策略,也可以作为规划器,其优势包括:
实验
该团队评估了扩散强制作为生成序列模型的优势,其中涉及视频和时间序列预测、规划和模仿学习等多种应用。
视频预测:一致且稳定的序列生成和无限展开
针对视频生成式建模任务,他们基于 Minecraft 游戏视频和 DMLab 导航为因果扩散强制训练了一个卷积 RNN 实现。
图 3 展示了扩散强制与基准的定性结果。
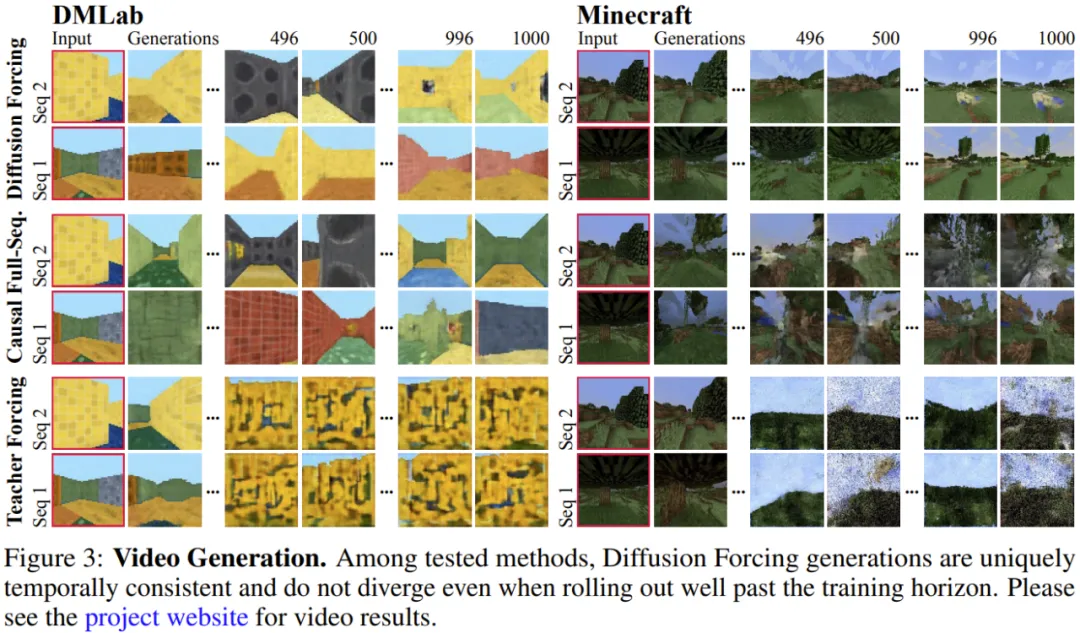
可以看到,扩散强制能稳定地展开,甚至能超过其训练范围;而教师强制和全序列扩散基准会很快发散。
扩散规划:MCTG、因果不确定性、灵活的范围控制
扩散强制的能力能为决策带来独有的好处。该团队使用一种标准的离线强化学习框架 D4RL 评估了新提出的决策框架。
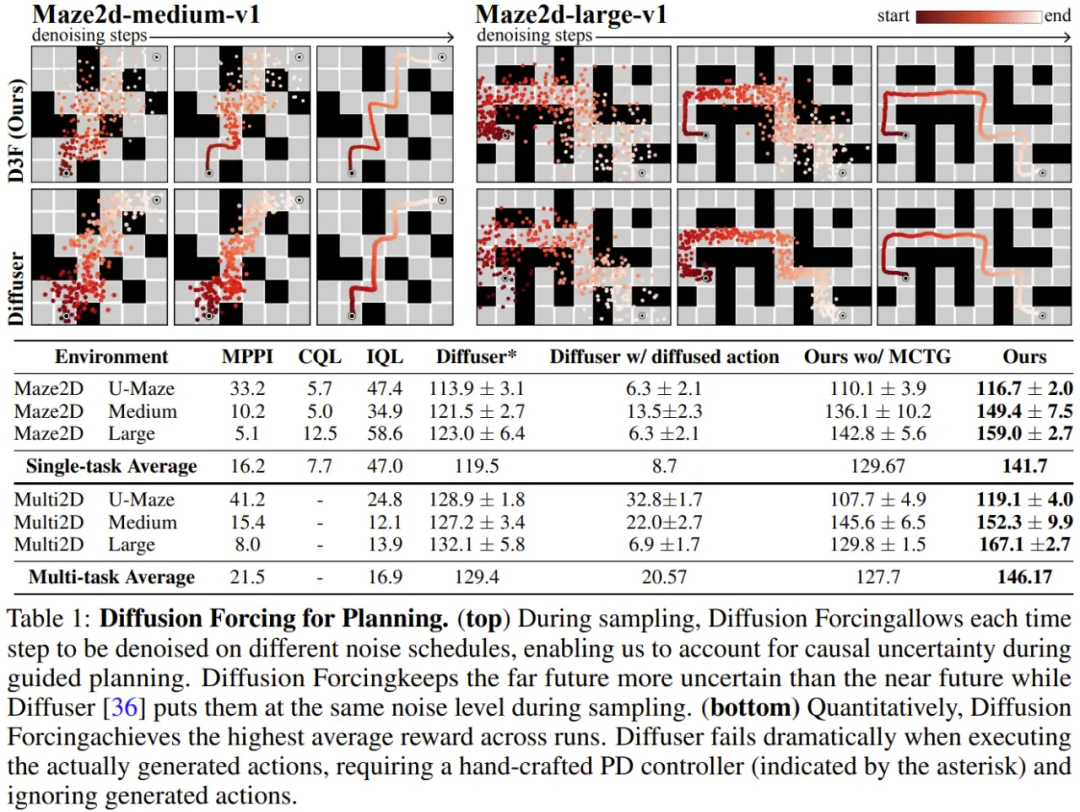
表 1 给出了定性和定量的评估结果。可以看到,扩散强制在全部 6 个环境中都优于 Diffuser 和所有基准。
可控的序列组合生成
该团队发现,仅需修改采样方案,就可以灵活地组合训练时间观察到的序列的子序列。
他们使用一个 2D 轨迹数据集进行了实验:在一个方形平面上,所有轨迹都是始于一角并最终到达对角,形成一种十字形。
如上图 1 所示,当不需要组合行为时,可让 DF 保持完整记忆,复制十字形的分布。当需要组合时,可让模型使用 MPC 无记忆地生成更短的规划,从而实现对这个十字形的子轨迹的缝合,得到 V 形轨迹。
机器人:长范围模仿学习和稳健的视觉运动控制
扩散强制也为真实机器人的视觉运动控制带来了新的机会。
模仿学习是一种常用的机器人操控技术,即学习专家演示的观察到动作的映射。但是,缺乏记忆往往会让模仿学习难以完成长范围的任务。DF 不仅能缓解这个短板,还能让模仿学习更稳健。
使用记忆进行模仿学习。通过遥控 Franka 机器人,该团队收集了一个视频和动作数据集。如图 4 所示,任务就是利用第三个位置交换苹果和橘子的位置。水果的初始位置是随机的,因此可能的目标状态有两个。
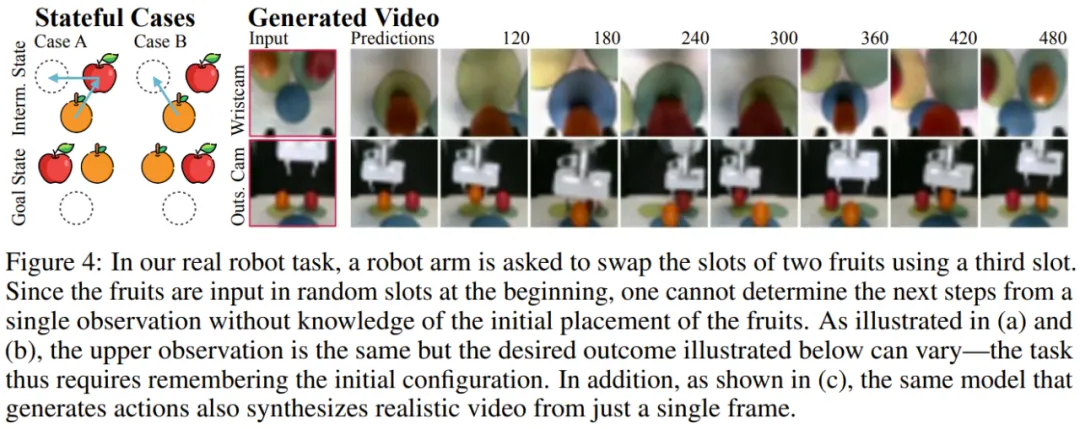
此外,当第三个位置有一个水果时,就无法通过当前观察推断出所需结果 —— 策略必须记住初始配置才能决定移动哪个水果。不同于常用的行为克隆方法,DF 可以自然地将记忆整合进自己的隐藏状态中。结果发现,DF 能实现 80% 的成功率,而扩散策略(当前最佳的无记忆模仿学习算法)却失败了。

此外,DF 还能更稳健地应对噪声并助益机器人预训练。
时间序列预测:扩散强制是一种优秀的通用序列模型
对于多变量时间序列预测任务,该团队的研究表明 DF 足以与之前的扩散模型和基于 Transformer 的模型媲美。
更多技术细节和实验结果请参阅原论文。
文章来自于微信公众号“机器之心”,作者 “Panda W”




【开源免费】Browser-use 是一个用户AI代理直接可以控制浏览器的工具。它能够让AI 自动执行浏览器中的各种任务,如比较价格、添加购物车、回复各种社交媒体等。
项目地址:https://github.com/browser-use/browser-use
【开源免费】AutoGPT是一个允许用户创建和运行智能体的(AI Agents)项目。用户创建的智能体能够自动执行各种任务,从而让AI有步骤的去解决实际问题。
项目地址:https://github.com/Significant-Gravitas/AutoGPT
【开源免费】MetaGPT是一个“软件开发公司”的智能体项目,只需要输入一句话的老板需求,MetaGPT即可输出用户故事 / 竞品分析 / 需求 / 数据结构 / APIs / 文件等软件开发的相关内容。MetaGPT内置了各种AI角色,包括产品经理 / 架构师 / 项目经理 / 工程师,MetaGPT提供了一个精心调配的软件公司研发全过程的SOP。
项目地址:https://github.com/geekan/MetaGPT/blob/main/docs/README_CN.md
