蒸馏效果起飞!DOPD破解「特权幻觉」,让在线策略蒸馏更有效
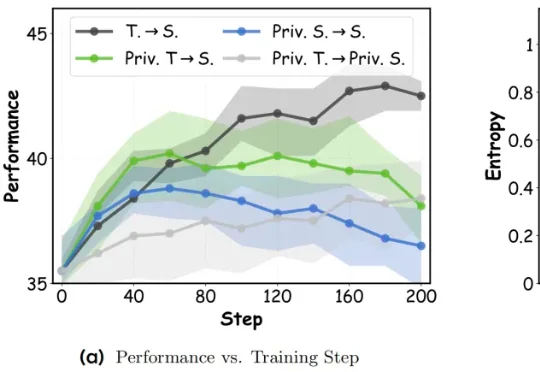
蒸馏效果起飞!DOPD破解「特权幻觉」,让在线策略蒸馏更有效最近,来自新加坡国立大学、香港中文大学 MMLab、北京大学和京东探索研究院的研究团队提出了一种全新的在线策略蒸馏方法: DOPD (Dual On-policy Distillation) ,通过优势感知的双重蒸馏范式,成功破解了这一难题。
来自主题: AI技术研报
8082 点击 2026-07-09 09:48
 搜索
搜索
最近,来自新加坡国立大学、香港中文大学 MMLab、北京大学和京东探索研究院的研究团队提出了一种全新的在线策略蒸馏方法: DOPD (Dual On-policy Distillation) ,通过优势感知的双重蒸馏范式,成功破解了这一难题。
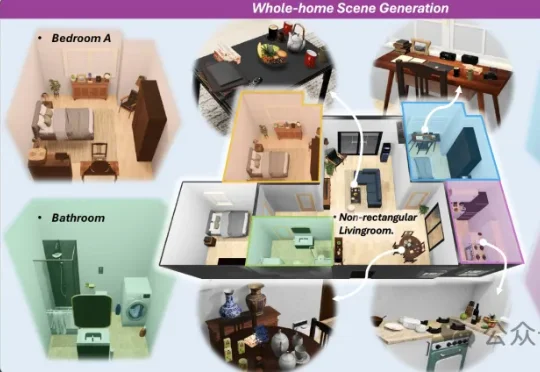
一觉睡醒,具身智能公司竟然也开始搞房地产了?!刚刚,大晓机器人联合港中文MMLab发布了一个新项目——Kairos-Homeworld,全球首个实现全屋三维生成与物体级全交互的统一框架。
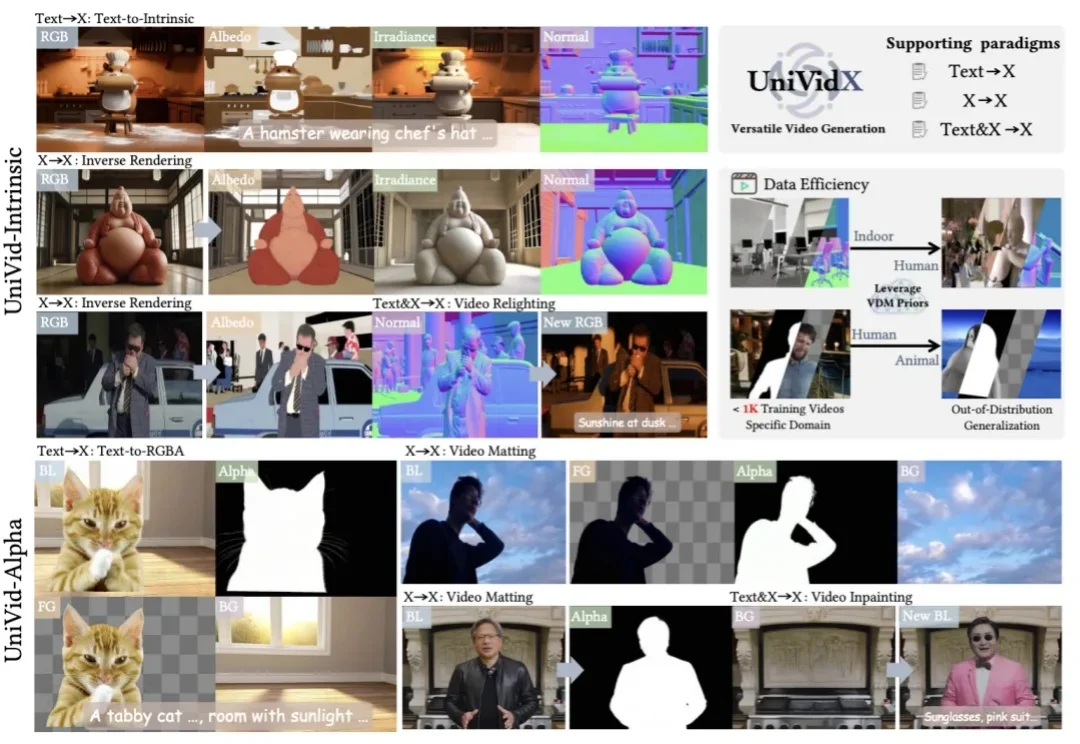
近日,由香港科技大学 MMLab 及合作团队完成的研究工作「UniVidX: A Unified Multimodal Framework for Versatile Video Generation via Diffusion Priors」被计算机图形学顶级会议 SIGGRAPH 2026 正式接收。

南洋理工大学MMLab团队推出Hand2World,让AI世界模型真正「伸手」互动。只需在空中比划手势,模型就能生成逼真第一人称交互视频,实时响应调整。它摒弃旧有遮挡误导,用3D手部结构与射线编码解耦手与头运动,首次实现闭环持续交互。
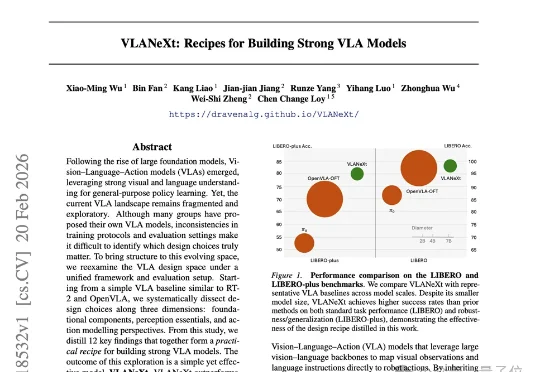
MMLab@NTU联合中山大学的最新研究,给出了一份从入门到精通的终极“菜谱”——VLANeXt。这项研究没有简单提出一个新模型了事,而是系统性地从12个关键维度,深度剖析了VLA的设计空间。从基础组件到感知要素,再到动作建模的额外视角,每一步都有扎实的实验支撑。
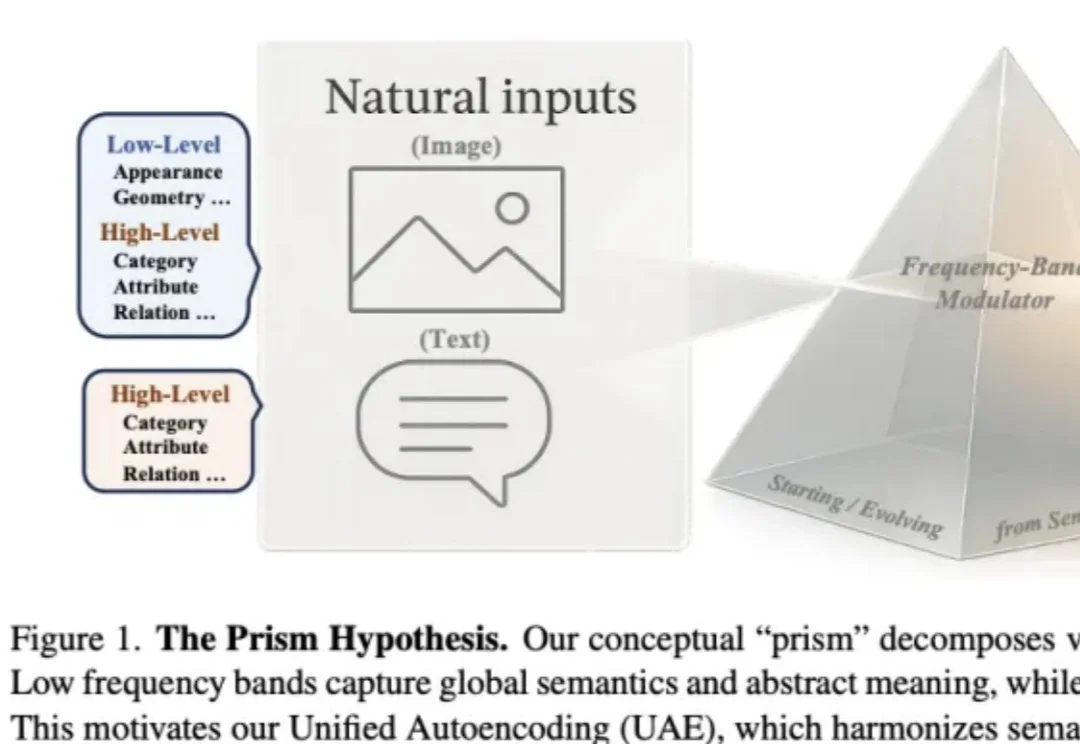
作者来自 Nanyang Technological University(MMLab) 与 SenseTime Research,提出 Prism Hypothesis(棱镜假说) 与 Unified Autoencoding(UAE),尝试用 “频率谱” 的统一视角,把语义编码器与像素编码器的表示冲突真正 “合并解决”。
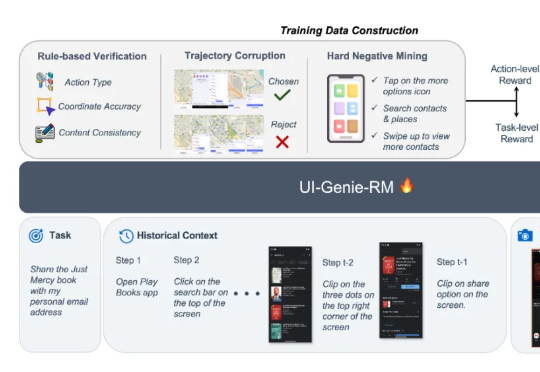
本文来自于香港中文大学 MMLab 和 vivo AI Lab,其中论文第一作者肖涵,主要研究方向为多模态大模型和智能体学习,合作作者王国志,研究方向为多模态大模型和 Agent 强化学习。项目 le
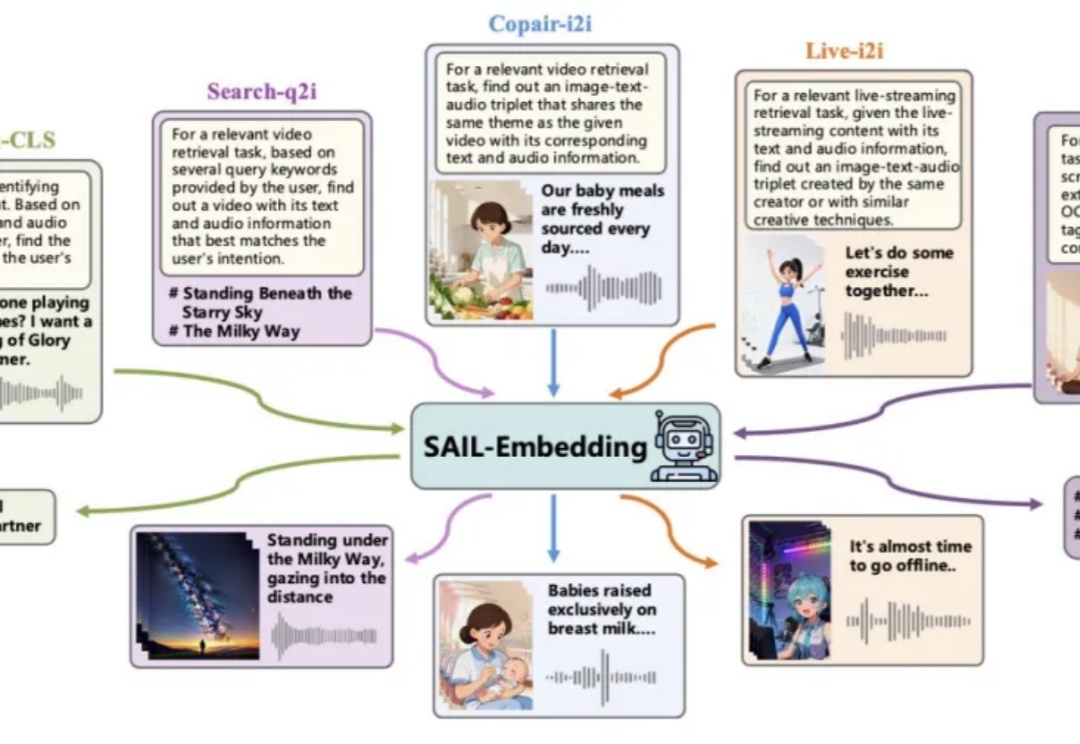
在短视频推荐、跨模态搜索等工业场景中,传统多模态模型常受限于模态支持单一、训练不稳定、领域适配性差等问题。
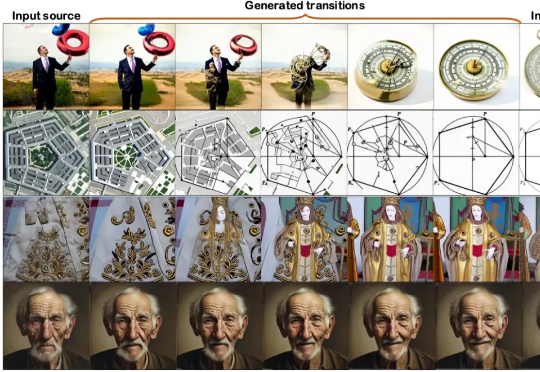
本文第一作者操雨康,南洋理工大学MMLab博士后,研究方向是3D/4D重建与生成,人体动作/视频生成,以及图像生成与编辑。
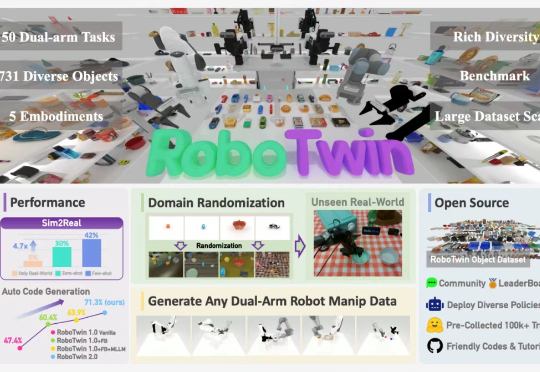
最近,上海交通大学 ScaleLab 与香港大学 MMLab@HKU 领衔发布 RoboTwin 系列新作 RoboTwin 2.0 以及基于 RoboTwin 仿真平台在 CVPR 上举办的双臂协作竞赛 Technical Report。