

2025风口已至?6000字具身智能年度复盘,寻找产业投资机会!
2025风口已至?6000字具身智能年度复盘,寻找产业投资机会!回顾过去的2024年,具身智能技术的迭代迅猛,而围绕具身智能落地的形态也正在向着具象化衍进,人形机器人作为具身智能最佳载体,在今年获得了广泛的关注。
来自主题: AI资讯
6435 点击 2025-01-04 15:42
回顾过去的2024年,具身智能技术的迭代迅猛,而围绕具身智能落地的形态也正在向着具象化衍进,人形机器人作为具身智能最佳载体,在今年获得了广泛的关注。

AI 玩具火得一塌糊涂。 前段时间,特斯拉推出人形机器人玩具,售价 40 美元,一上线就被抢光。
2025年,机器人将往何处发展?在畅谈AGI浪潮之下,机器人又会是怎样的角色?昆仑万维创始人周亚辉新年投资笔记系列第一篇,凭借对科技革命周期的深刻理解,深度剖析了机器人时代的发展与走向。在不改变原意的基础上,量子位做了以下整理(略有删节),能够给大家带来启发。
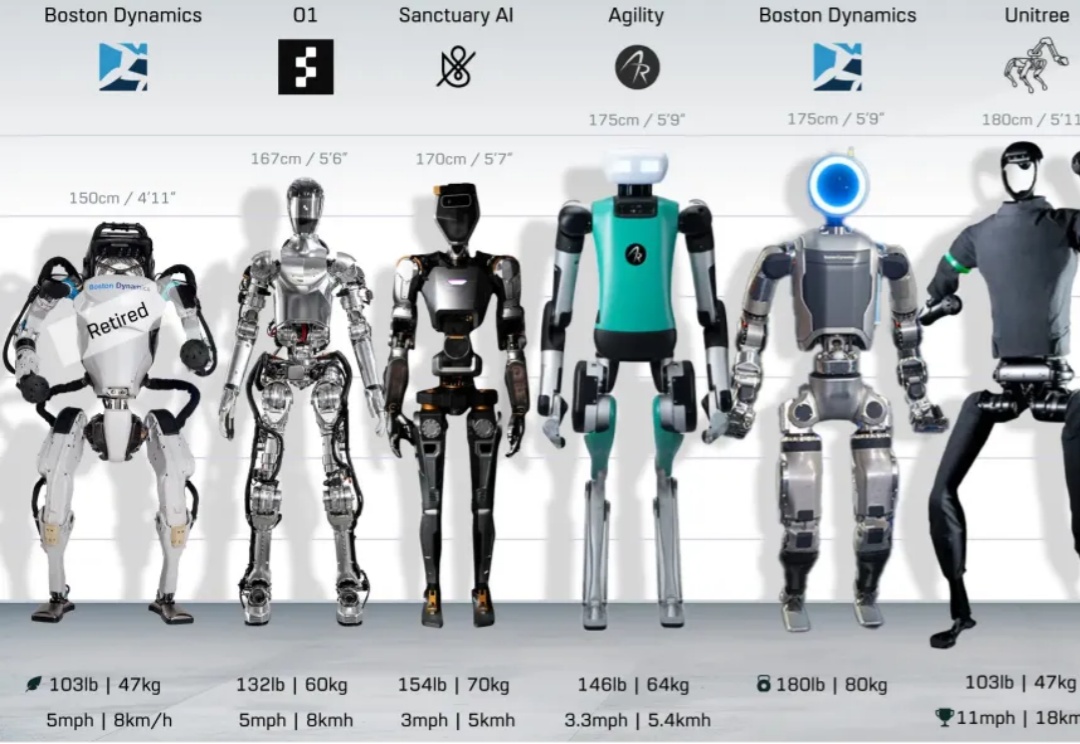
随着AI时代的到来,算法、大模型、深度学习等技术飞速发展,使得人形机器人成为了面向未来的黄金赛道。
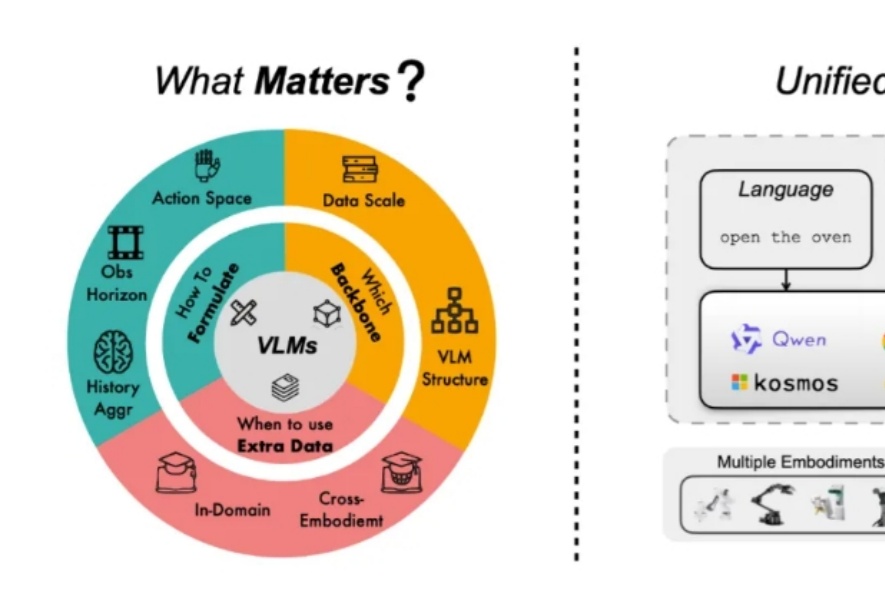
近年来,视觉语言基础模型(Vision Language Models, VLMs)大放异彩,在多模态理解和推理上展现出了超强能力。现在,更加酷炫的视觉语言动作模型(Vision-Language-Action Models, VLAs)来了!通过为 VLMs 加上动作预测模块,VLAs 不仅能 “看” 懂和 “说” 清,还能 “动” 起来,为机器人领域开启了新玩法!

1939年,一台会说话的机器人,震惊了造访纽约世博会的每一个游客。 机器人名叫Elektro,造型酷似「绿野仙踪」里的铁皮人,不过覆满全身的是铝板,且被涂成了古铜色,它由西屋电气生产,在设计上带有典型的工程师风格。
苹果要搞人形机器人这事儿现在传得沸沸扬扬。 最近他们确实有新动作——开发了一套机器人感知系统! 系统名为ARMOR,软硬件协同增强机器人的“空间意识”,能动态防碰撞的那种。

谷歌、亚马逊等巨头纷纷摆脱GPU依赖,于是英伟达选择押注机器人!现在,英伟达已开发了机器人全套解决方案,计划在明年年中发布全新一代人形机器人专用小型计算机Jetson Thor。全球机器人市场,或将迎来大爆发。
比亚迪也布局具身智能了。

公司首款AI陪伴机器人产品已经研发完成,并已实现量产。