最适合机器人的视频基座模型,被中国团队开源了
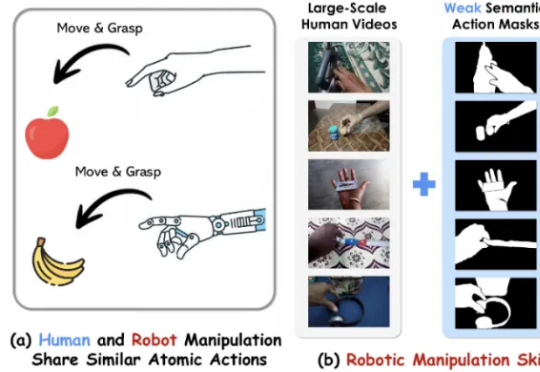
最适合机器人的视频基座模型,被中国团队开源了蚂蚁灵波选择了后一条路:开源 LingBot-Video。这是一个面向具身智能的视频生成基座模型,也是一套专为机器人场景设计的 DiT 视频预训练范式。通用视频模型更多学习画面变化、镜头运动和视觉风格;LingBot-Video 则把重点放在动作、任务、交互和物理环境变化上,面向世界预测、动作理解和机器人训练构建视频生成基座。
来自主题: AI技术研报
8133 点击 2026-07-10 10:41