
世界模型是梦核军备竞赛
世界模型是梦核军备竞赛在无人在意的角落,世界模型如雨后春笋般集体震撼首发。
来自主题: AI资讯
9907 点击 2026-05-06 14:29
 搜索
搜索
在无人在意的角落,世界模型如雨后春笋般集体震撼首发。
用强化学习(RL)优化文生图模型的 prompt following 能力,是一条被广泛验证的路径 —— 让模型根据 prompt 用不同随机种子生成多张图片,通过 reward model 计算 reward,再利用相关 RL 算法优化模型。

独家获悉,字节跳动日前低调公布全球首个25B级、基于混合专家 (MoE) -扩散自注意力机制(DiT) 的开源增强统一多模态模型Mamoda2.5。Mamoda2.5依托Qwen3-VL-8B、128 个专家,Top-8 路由的MoE+DiT架构搭建,最终模型参数高达250亿,而每次仅激活约30亿参数(约12%)。
ChatGPT默认模型,今天大升级。

Anthropic联合创始人Jack Clark读完数百份公开数据,得出一个让他自己也坐不住的结论:2028年底前,AI自己造AI的概率是60%。支撑他这一判断的,是编程、科研复现、模型训练优化等多条能力曲线:每一条都在向右上方飞,没有减速迹象。

独家获悉,RoboScience 机器科学于近日完成十亿元 A 轮融资,投资方包含多家国内外知名产业巨头及一线财务机构。本轮融资将用于持续深化其核心的 VLOA 大模型技术,以及推进自研机器人本体的工程化与量产,加速通用具身智能解决方案的规模化落地。

如果您经常用Claude Code、OpenCode、OpenClaw这类Agent框架,大概率会遇到一种不稳定现象:同一个Skills,用Claude能跑,换成Qwen就不行了;在Claude Code里稳定的流程,换到OpenClaw可能输出格式崩掉;在作者环境里正常的脚本,到了自己机器上可能因为缺依赖进入反复报错。
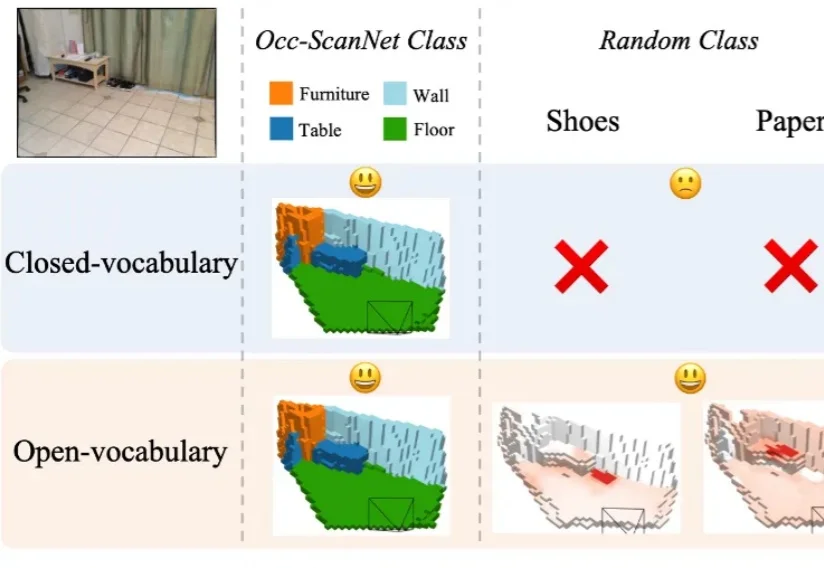
在具身智能研究中,如何让智能体精准理解周围环境的精细几何结构与开放语义信息,始终是具身感知的核心难题。近年来,语义占据预测(Semantic Occupancy Prediction) 将稠密几何与语义信息统一到三维体素网格中,用于构建 3D 语义占据地图,为机器人的空间推理、导航与交互操作提供了场景表达基础。
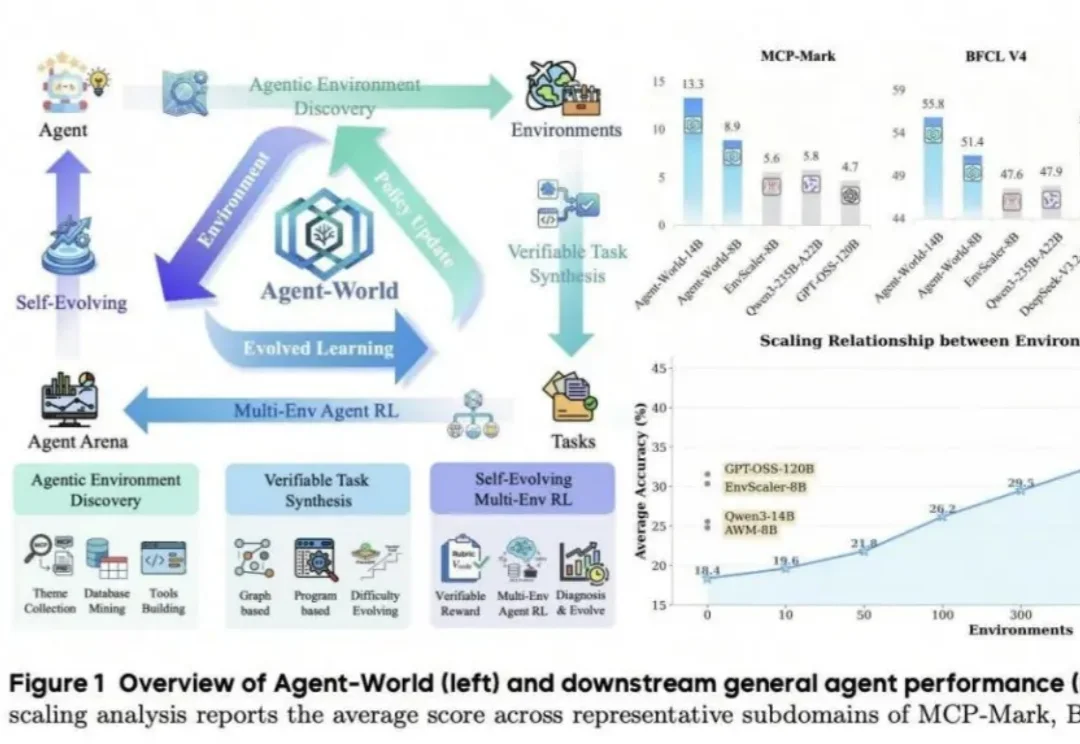
随着MCP、Agent Skills与各类Harness的快速发展,大模型能轻松调用成百上千种外部工具,但在多工具,具备复杂状态、长程交互的任务上仍有明显短板。尽管一系列环境扩展方法尝试复刻真实世界的交互环境(如订票系统,外卖平台),但仍受限于环境扩展的规模与真实性。
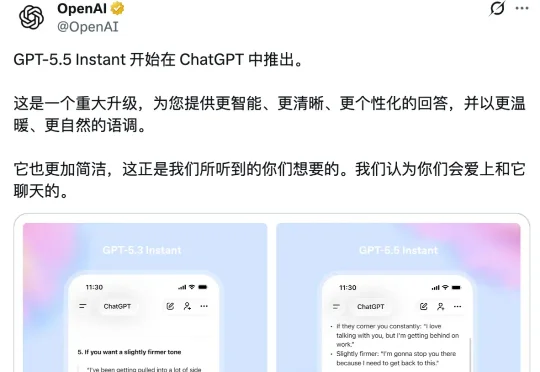
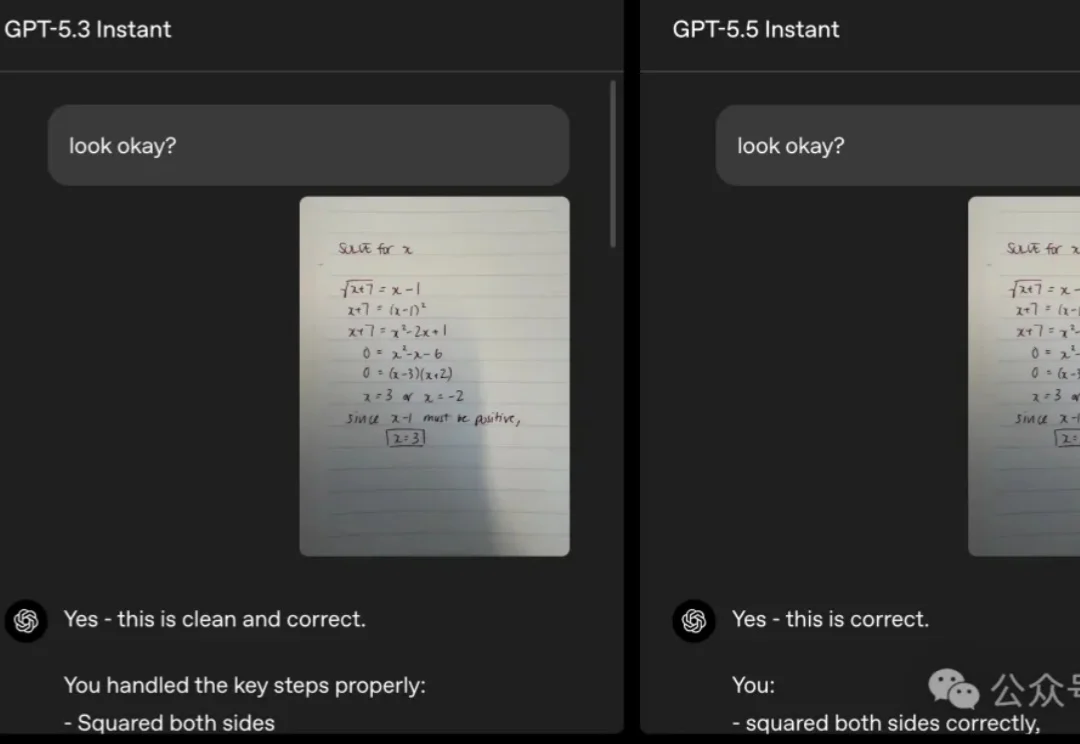
就在刚刚,OpenAI 正式发布了 GPT-5.5 Instant,将其设为 ChatGPT 的默认模型,取代此前的 GPT-5.3 Instant,面向所有用户开放。Instant 系列是 ChatGPT 的日常主力模型,每天有数以亿计的用户在用。官方说,在这个量级上,哪怕只是小幅改进,积累起来的效果也相当可观。