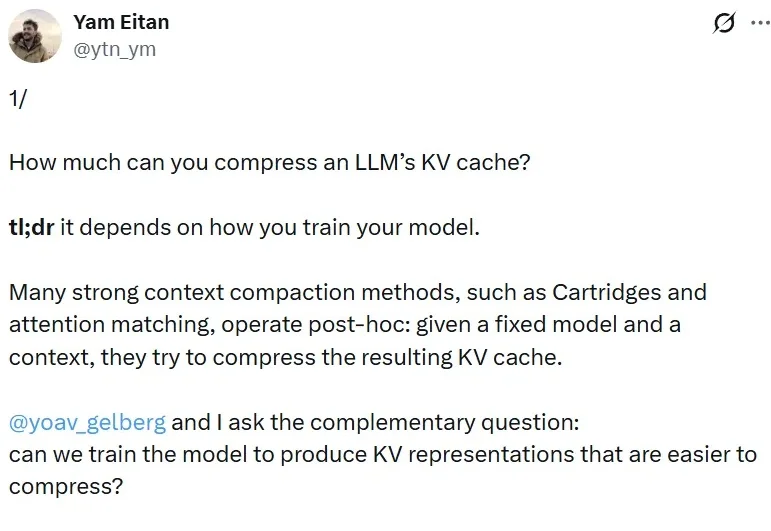
牛津、英伟达等提出记忆压缩新范式:训练时让模型学会断舍离
牛津、英伟达等提出记忆压缩新范式:训练时让模型学会断舍离2026 年初,各大 AI 厂商在上下文窗口长度上展开激烈角逐。Google 的 Gemini 3 Pro 已支持 100 万级 token 上下文,Meta 的 Llama 4 Scout 更宣称可处理 1000 万 token。GPT-5 系列也在快速推进长上下文能力。
来自主题: AI技术研报
9975 点击 2026-06-02 11:23
 搜索
搜索
2026 年初,各大 AI 厂商在上下文窗口长度上展开激烈角逐。Google 的 Gemini 3 Pro 已支持 100 万级 token 上下文,Meta 的 Llama 4 Scout 更宣称可处理 1000 万 token。GPT-5 系列也在快速推进长上下文能力。
没有新的GPU,没有新的智算卡。

中国AI研究员的性格、魅力和真诚……让人倍感亲切。这是艾伦研究所(Ai2)的研究员Nathan Lambert,在最近结束中国之行后,发自内心的一番感慨。在Nathan眼里,国内的LLM圈子简直是天堂,大家彼此尊重、即便立场不同也客客气气的。
2026 年 3 月底,Ollama 发布了一则更新公告:其 Mac 版本的底层推理引擎,将从沿用多年的 llama.cpp 切换为苹果的 MLX 框架。
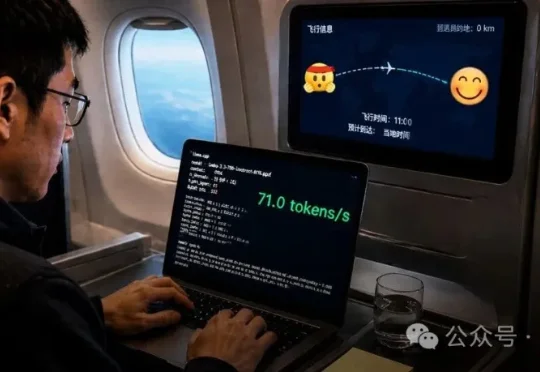
一位中国开发者,在横跨大西洋的航程中,在飞机上用 MacBook 本地跑 Llama 70B,整整 11 小时没有网络,帖子瞬间在X上爆火!但是随后,越来越多网友发现,这故事不太对啊?
从单幅图像恢复三维结构,到多视图场景建模、动态 4D 重建,再到机器人、自动驾驶、SLAM 与视频生成,如何让模型在不依赖逐场景优化的前提下,直接、高效地理解并重建三维世界,正在成为 3D 视觉领域的

SLAM教父罕见公开点赞!中国队开源的LingBot-Map,仅靠普通摄像头实现万帧流式3D重建,在全网引爆120万人围观。
当大模型训练进入深水区,竞争的关键已经不再只是「模型参数怎么调」,而逐渐转向一个更核心、也更难系统解决的问题:模型在训练过程中究竟看到了什么数据、以什么比例看到、哪些样本应该被更频繁地学习。

MiniMax M2.7 在今天正式开源。我们和华为昇腾、摩尔线程、沐曦、昆仑芯、NVIDIA,以及 Together AI、Fireworks、Ollama 等海内外芯片厂商、推理平台携手,在开源首日即完成模型接入与推理适配工作,推动全球 AI 生态繁荣发展。
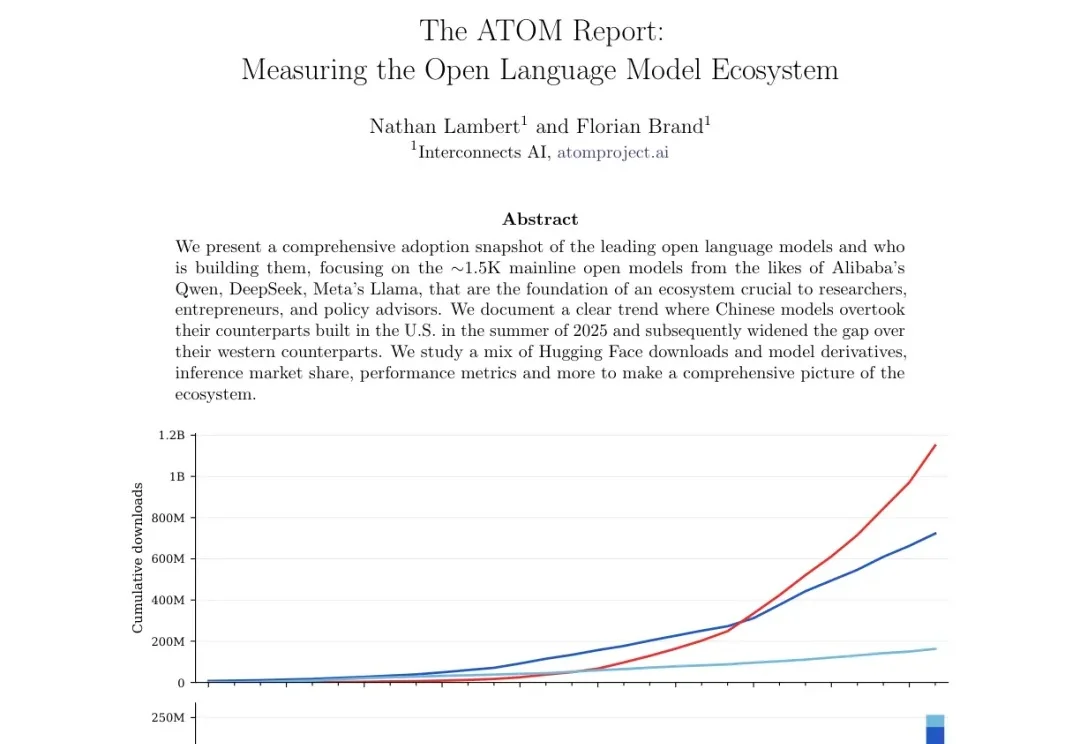
2026 年 4 月,Nathan Lambert 和 Florian Brand 发布了 The ATOM Report,一份关于开源语言模型生态的综合采纳度快照。这份报告追踪了约 1500 个主线开源模型的下载量、衍生模型、推理市场份额和性能数据,覆盖 2023 年 11 月到 2026 年 3 月