小米发布Xiaomi-Robotics-1具身基座模型:100000h真实数据,首次系统验证机器人Scaling Law
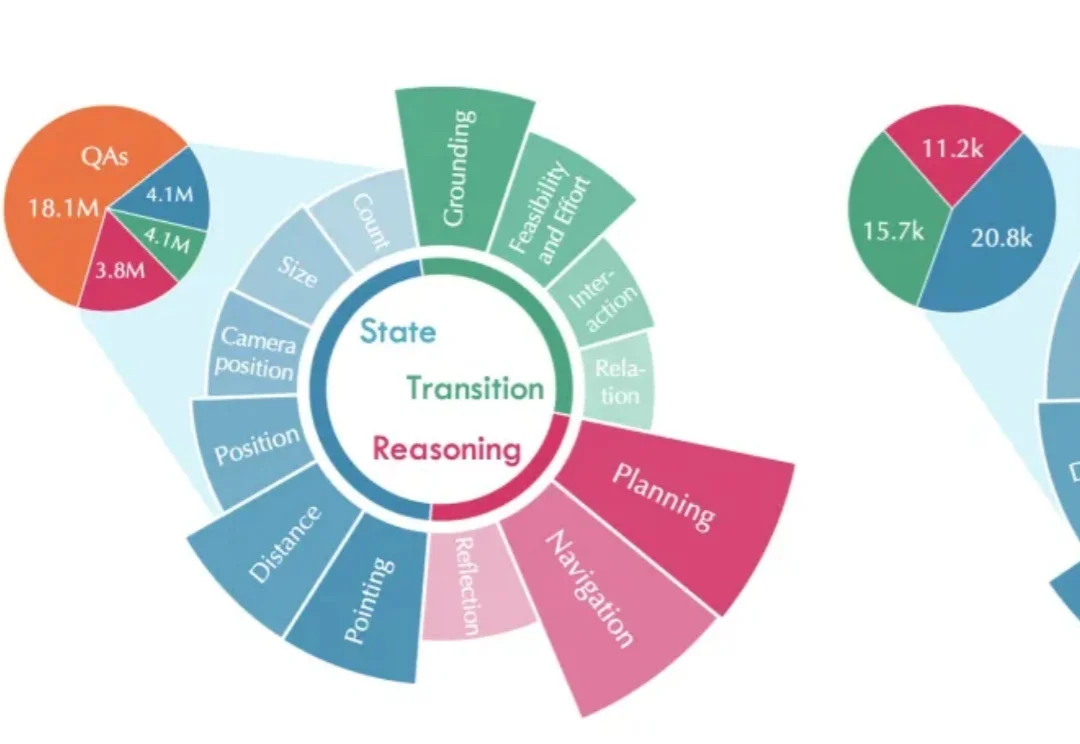
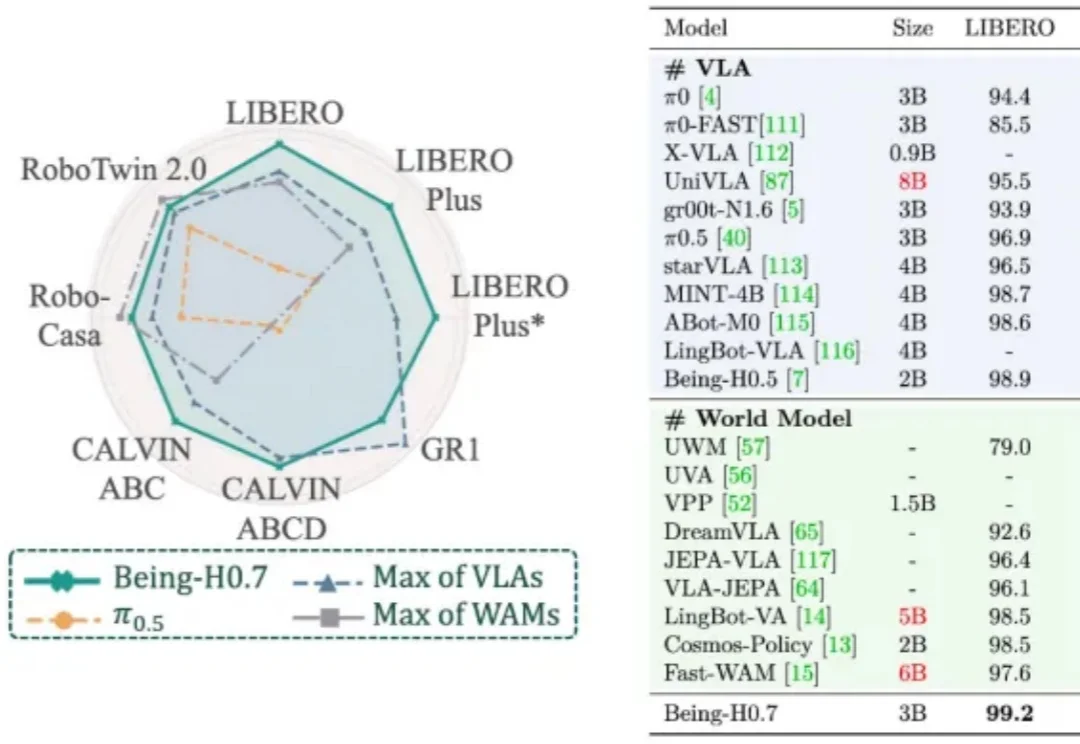
小米发布Xiaomi-Robotics-1具身基座模型:100000h真实数据,首次系统验证机器人Scaling Law今天,小米刚刚扔出一颗“深水炸弹”——Xiaomi-Robotics-1具身基座模型,试图改变这一局面。Xiaomi-Robotics-1基于10万小时真实世界操作轨迹进行预训练,再用约1.1万小时跨本体数据完成后训练。据悉,这是国内首次在机器人策略模型中,对Scaling Law进行较为完整的系统验证。
来自主题: AI资讯
8522 点击 2026-07-16 16:24