罗福莉:Claude订阅封杀龙虾背后,真正的出路不是更便宜的token
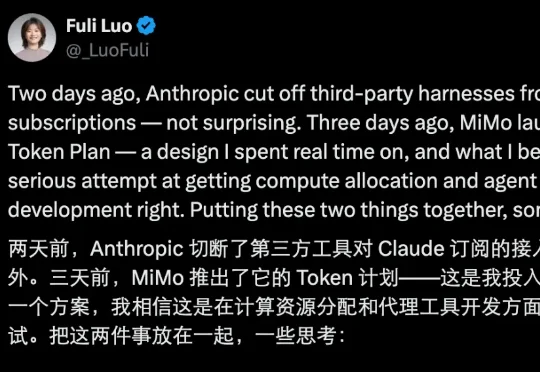
罗福莉:Claude订阅封杀龙虾背后,真正的出路不是更便宜的tokenAgent 时代,我们需要正确的计费和工程设计哲学,这是 Xiaomi MiMo 大模型负责人罗福莉刚刚在 X 上发表的观点。前两天,我们报道了一则消息 ——Anthropic 宣布,即日起,Claude Pro 和 Max 订阅用户,不得再将订阅额度用于 OpenClaw 等第三方 Agent 框架。想继续用?那就必须切换到按用量付费的 API。
来自主题: AI资讯
8128 点击 2026-04-06 09:51