
AI自己写代码做科研还跑赢了前沿算法?清华团队开源Alchemy框架
AI自己写代码做科研还跑赢了前沿算法?清华团队开源Alchemy框架AI 驱动的自动化科研正从概念走向真实系统。近期受到广泛关注的 FARS,以及 Karpathy 开源的 autoresearch,都在不同程度上展示了 AI Scientist 自动进行 AI 领域研究的可行性。
来自主题: AI技术研报
7003 点击 2026-03-23 13:43
 搜索
搜索
AI 驱动的自动化科研正从概念走向真实系统。近期受到广泛关注的 FARS,以及 Karpathy 开源的 autoresearch,都在不同程度上展示了 AI Scientist 自动进行 AI 领域研究的可行性。
2026 年,OpenClaw 引爆 AI 圈,但 B 站 UP 主开发的硬核 Agent 框架 AstrBot 早在 2023 年 1 月就发布了第一个版本。B 站是如何凭借独特的社区反馈机制,成为孕育 AI 技术落地的「第一现场」?
在此背景下,浙江大学研究团队提出了 EasySteer——一个基于 vLLM 构建的高性能、可扩展 LLM Steering 统一框架。该框架通过与 vLLM 推理引擎的深度集成,相比现有 Steering 框架实现了 10.8-22.3 倍的推理加速,同时提供更细粒度的干预控制,并为八大应用场景提供了预计算 Steering 向量与完整复现示例,方便研究者快速上手和对照复现。
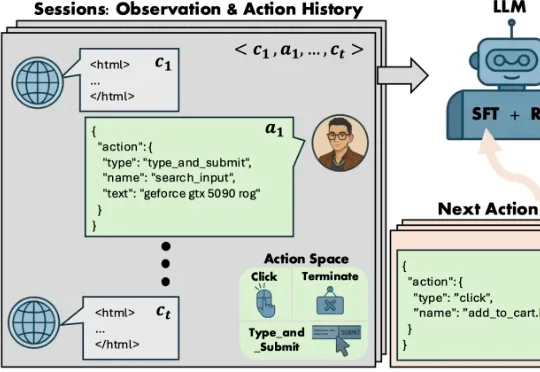
传统的 AI 购物助手更像是一个任务完成机器:接到指令,搜索,下单。他们或许能跑通流程,却完全无法理解用户为何在最后一刻因为一条关于 “夹耳朵” 的差评而放弃支付。简而言之,传统的电商 Agent 只是任务导向的(task-oriented),而不是模拟导向的(simulation-oriented)。为此,来自亚马逊(Amazon)的研究团队提出了名为 Shop-R1 的训练框架 。
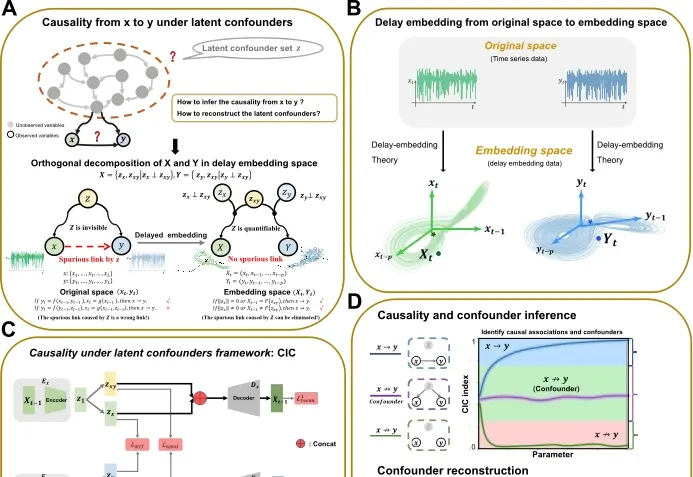
从观测时间序列数据中准确识别因果关系,是生命科学、地球科学、经济学以及人工智能等诸多领域的核心科学问题。尤其在复杂生物系统中,基因、蛋白质和代谢物之间高度耦合,并常常受到大量不可观测因素的干扰——这些「隐形混杂」无法被直接测量,却会严重误导因果推断结果,产生虚假的因果关联。
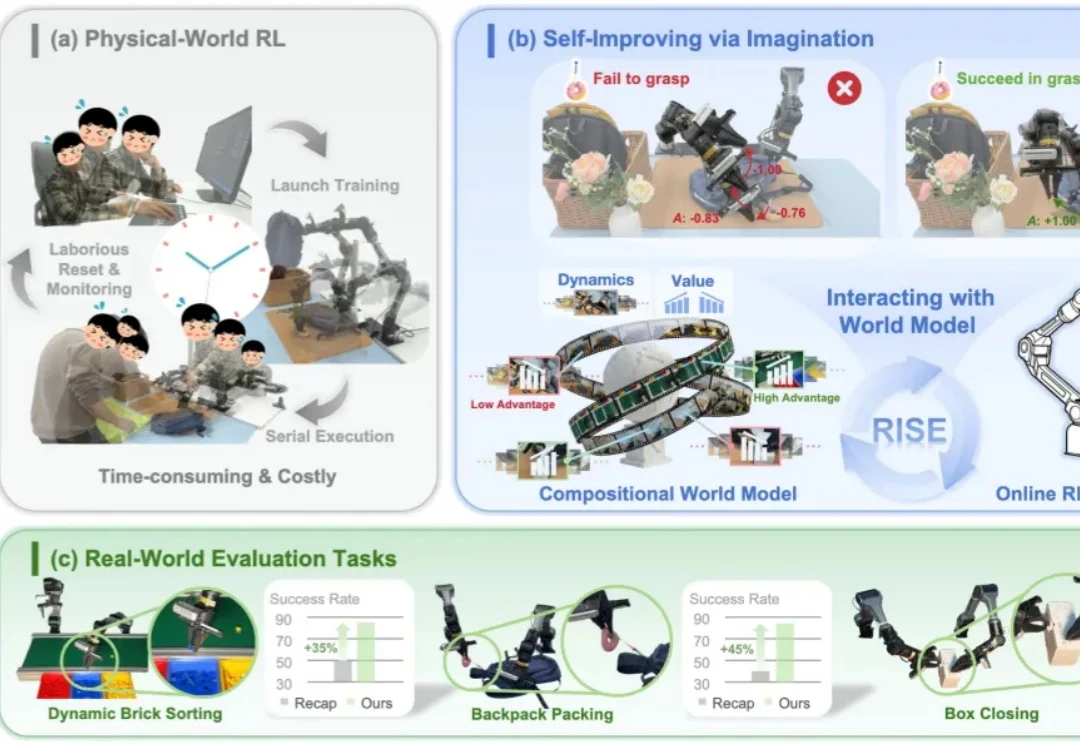
在具身智能的发展路径中,视觉 - 语言 - 动作(VLA)模型正逐步成为通用操作任务的核心框架。但当任务进入长程规划、柔性物体操作、精细双臂协同、动态交互等复杂场景时,VLA 仍然面临两个根本性挑战:

OpenClaw,是当下最火的开源个人 AI 助手。很多人不知道的是,OpenClaw 背后,核心是一个极简框架 Pi-coding-agent。

过去一周全网都在养那只红色卡通龙虾 OpenClaw。作为能够自己动手干活的 AI 智能体,有人花几千块请它回家,几天后账号被盗、文件被删,又花几百块请人卸载。从排队安装到扎堆卸载只隔了一周。
吉林大学&微软亚洲研究院等团队提出MindPower框架,让机器人像人一样理解他人想法并主动帮忙,构建了首个以机器人为中心的心智推理评测体系,通过六层推理链条,让AI不仅看懂场景,更能推断意图、做出决策、执行动作,显著提升助人能力。

多模态模型代码写得像老司机,却在数手指、量柱子时频频翻车?UniPat AI用五百行代码打造的SWE-Vision,让模型「掏出Python尺子」自我验证,一举拿下五大视觉相关基准SOTA。