AAAI 2026 Oral | SplatSSC:解耦深度引导的高斯泼溅,开启单目语义场景补全高效新范式
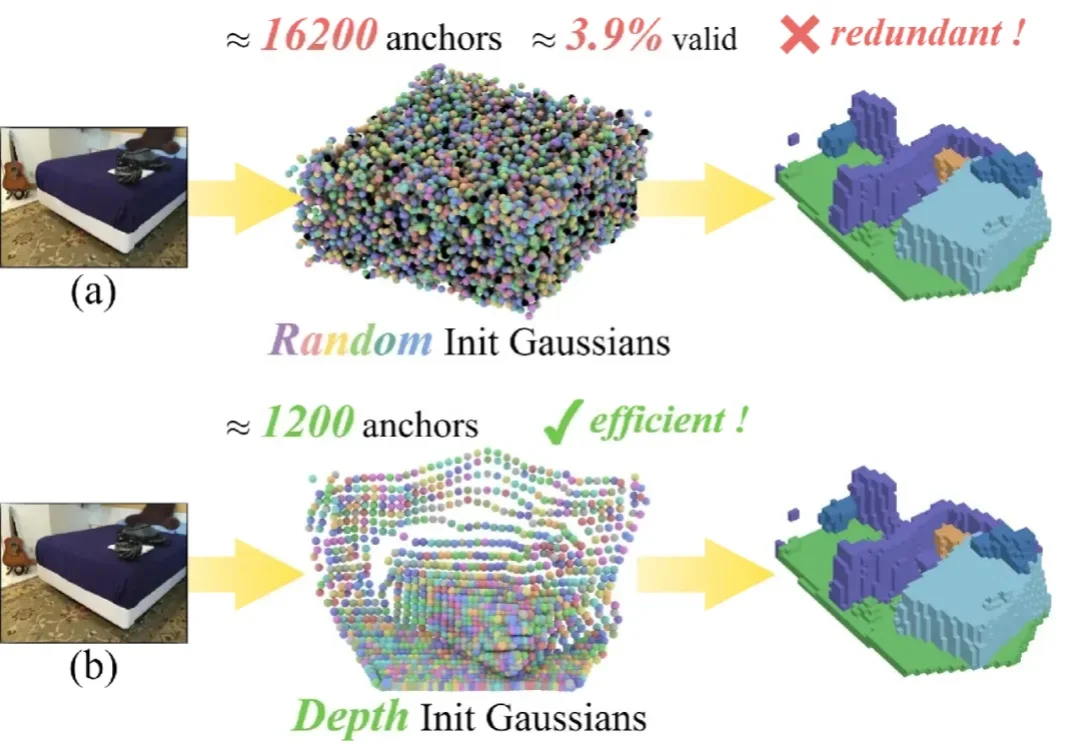
AAAI 2026 Oral | SplatSSC:解耦深度引导的高斯泼溅,开启单目语义场景补全高效新范式单目 3D 语义场景补全 (Semantic Scene Completion, SSC) 是具身智能与自动驾驶领域的一项核心技术,其目标是仅通过单幅图像预测出场景的密集几何结构与语义标签。
来自主题: AI技术研报
9650 点击 2026-01-28 14:58
 搜索
搜索
单目 3D 语义场景补全 (Semantic Scene Completion, SSC) 是具身智能与自动驾驶领域的一项核心技术,其目标是仅通过单幅图像预测出场景的密集几何结构与语义标签。
谷歌 DeepMind 发布 D4RT,彻底颠覆了动态 4D 重建范式。它抛弃了复杂的传统流水线,用一个统一的「时空查询」接口,同时搞定全像素追踪、深度估计与相机位姿。不仅精度屠榜,速度更比现有 SOTA 快出 300 倍。这是具身智能与自动驾驶以及 AR 的新基石,AI 终于能像人类一样,实时看懂这个流动的世界。
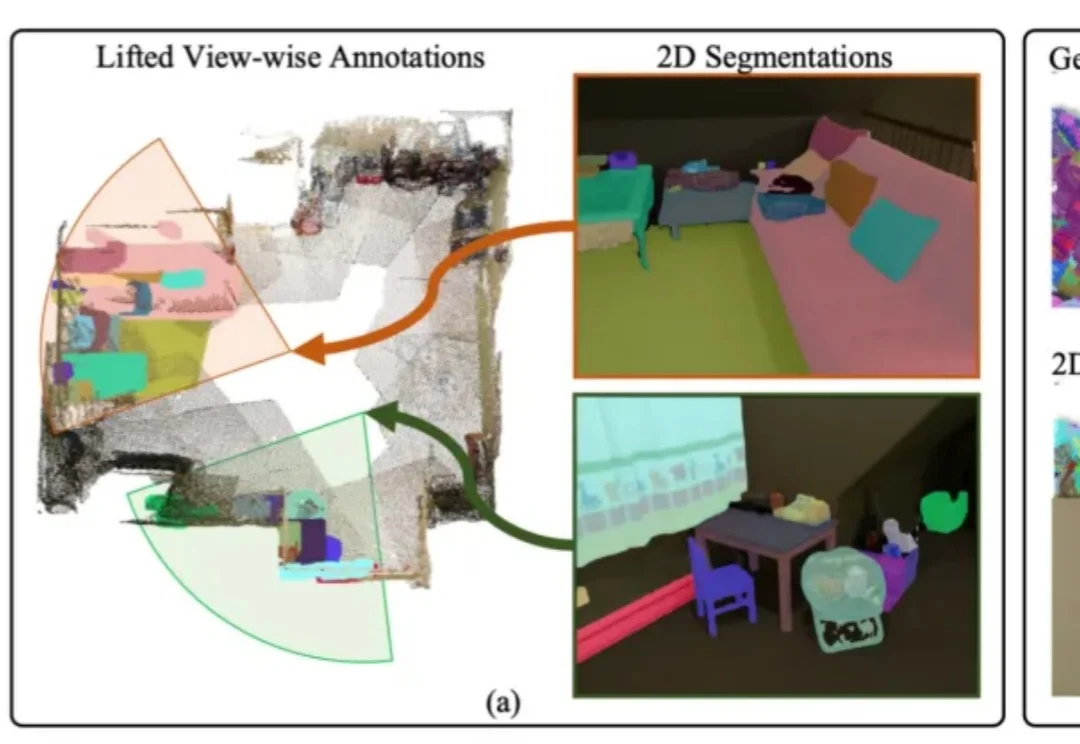
3D模型的实例分割一直受限于稀缺的训练数据与高昂的标注成本,训练效果有待提升。
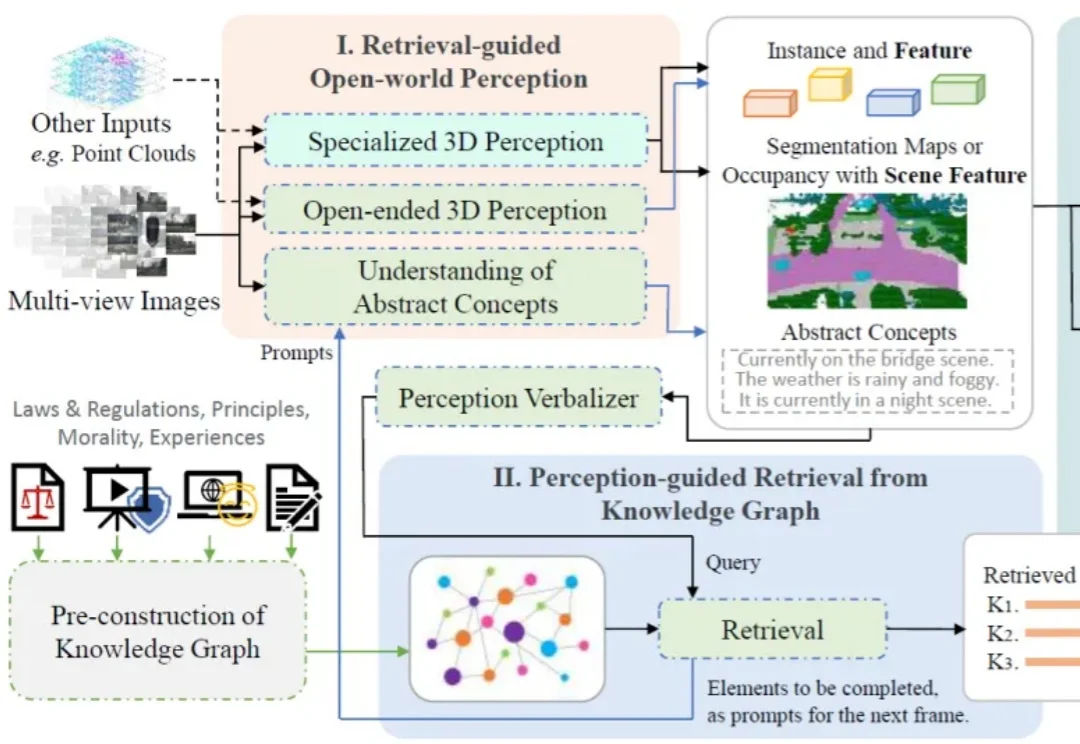
一个智能驾驶系统,在迈向高阶自动驾驶的过程中,应当具备何种能力?除了基础的感知、预测、规划、决策能力,如何对三维空间进行更深入的理解?如何具备包含法律法规、道德原则、防御性驾驶原则等知识?如何进行基本的视觉 - 语言推理?如何让智能系统具备世界观和价值观?
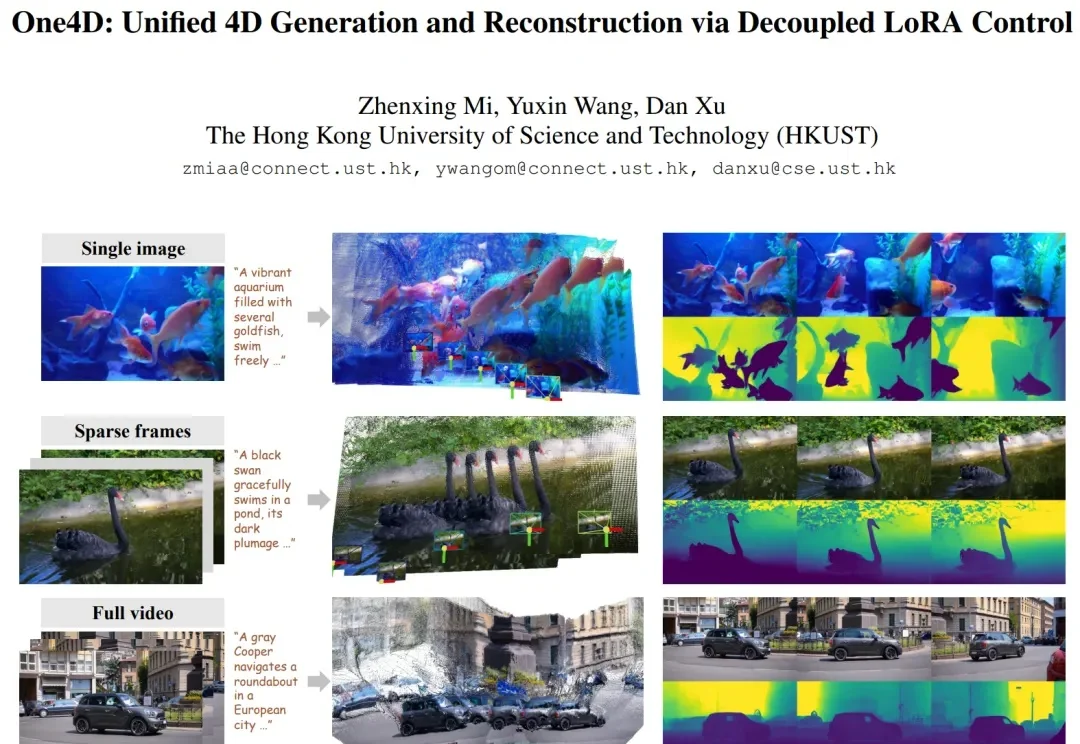
近年来,视频扩散模型在 “真实感、动态性、可控性” 上进展飞快,但它们大多仍停留在纯 RGB 空间。模型能生成好看的视频,却缺少对三维几何的显式建模。这让许多世界模型(world model)导向的应用(空间推理、具身智能、机器人、自动驾驶仿真等)难以落地,因为这些任务不仅需要像素,还需要完整地模拟 4D 世界。
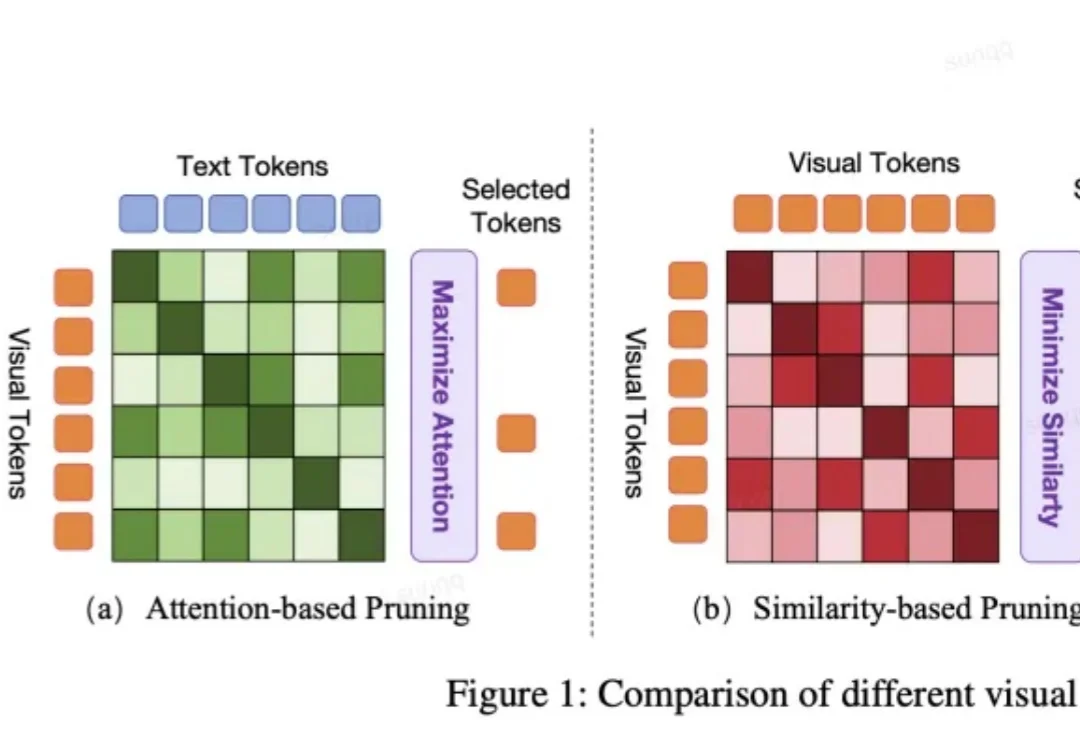
VLA 模型正被越来越多地应用于端到端自动驾驶系统中。然而,VLA 模型中冗长的视觉 token 极大地增加了计算成本。但现有的视觉 token 剪枝方法都不是专为自动驾驶设计的,在自动驾驶场景中都具有局限性。
财大气粗的老黄,又要出手了!为了将200多位顶尖AI人才纳入麾下,英伟达被曝拟用20~30亿美金收购一家以色列AI初创公司。这家公司名为AI21 Labs,是以色列为数不多的自主研发大语言模型的公司,其联创还曾创办了明星自动驾驶公司Mobileye(Mobileye被收购后成了英特尔副总裁)。
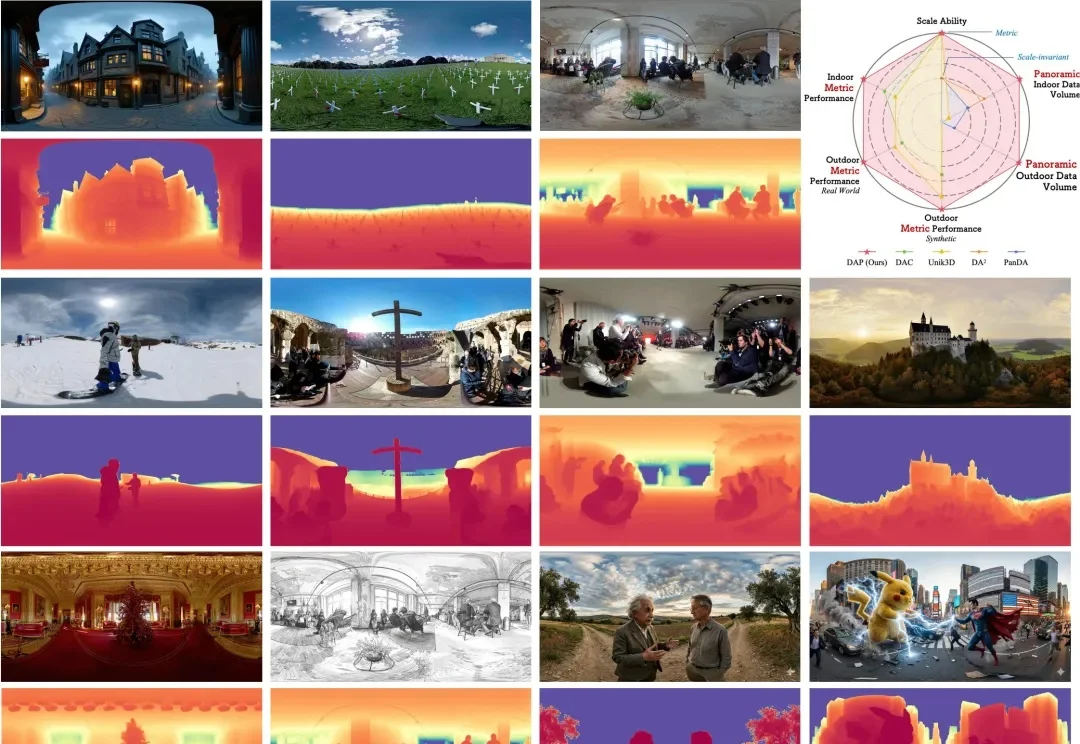
在空间智能(Spatial Intelligence)飞速发展的今天,全景视角因其 360° 的环绕覆盖能力,成为了机器人导航、自动驾驶及虚拟现实的核心基石。然而,全景深度估计长期面临 “数据荒” 与 “模型泛化差” 的瓶颈。

世界模型的场景,不止在自动驾驶方面。 极客公园近期接触到的 Deep Optica,刚刚完成由 BV 百度风投、零以创投参与的种子轮融资,正试图从「判断方式」本身入手,为这一高度不确定的过程提供一种更加结构化的路径。

近日,部分L3级自动驾驶车型已经通过工信部批准正式上路,这标志着这我国自动驾驶产业的新阶段。