
非Transformer架构新模型爆火,从第一性原理出发,MIT CSAIL衍生团队打造
非Transformer架构新模型爆火,从第一性原理出发,MIT CSAIL衍生团队打造挑战Transformer,MIT初创团队推出LFM(Liquid Foundation Model)新架构模型爆火。
来自主题: AI技术研报
10357 点击 2024-10-02 11:48
 搜索
搜索
挑战Transformer,MIT初创团队推出LFM(Liquid Foundation Model)新架构模型爆火。

首个由万卡集群训练出来的万亿参数大模型,被一家央企解锁了。

今天,OpenAI 2024年首场DevDay在旧金山2号码头的Gateway Pavilion低调举办。

知名开源数据科学平台提供商Anaconda 今天宣布推出AI Navigator,这是一款新型桌面应用程序,允许用户在笔记本电脑或个人电脑上本地运行一系列人工智能应用的大型语言模型(LLMs),而无需将任何数据发送到云服务器。
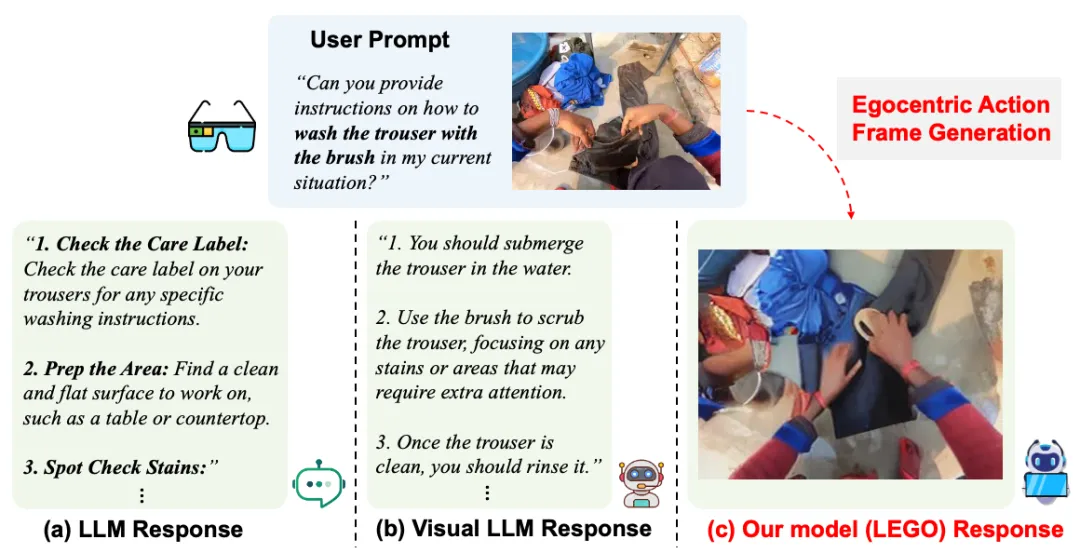
如何基于用户的问题和当前场景的照片,生成同一场景下的第一视角的动作图像,从而更准确地指导用户执行下一步行动?
EMOVA(EMotionally Omni-present Voice Assistant),一个能够同时处理图像、文本和语音模态,能看、能听、会说的多模态全能助手,并通过情感控制,拥有更加人性化的交流能力。
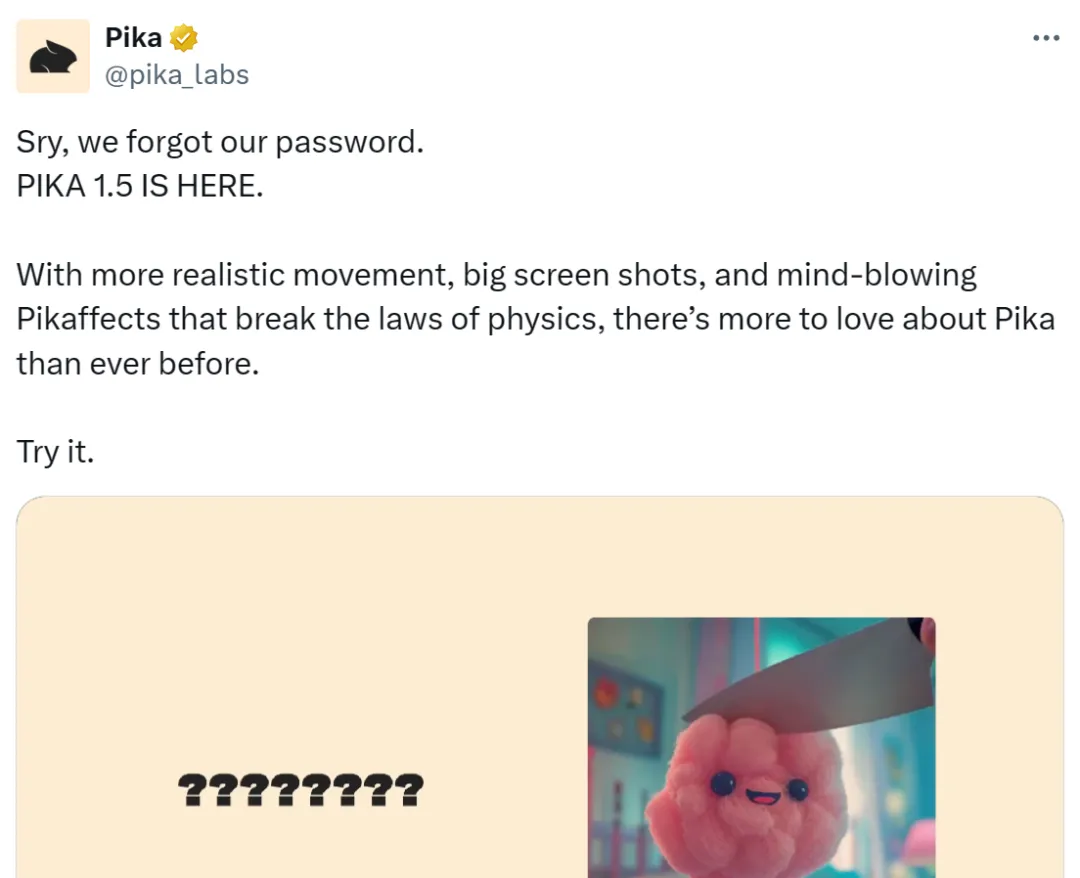
面对以 Sora 为代表的各种「后辈」视频生成模型的冲击,Pika 迟迟没有大的版本更新。
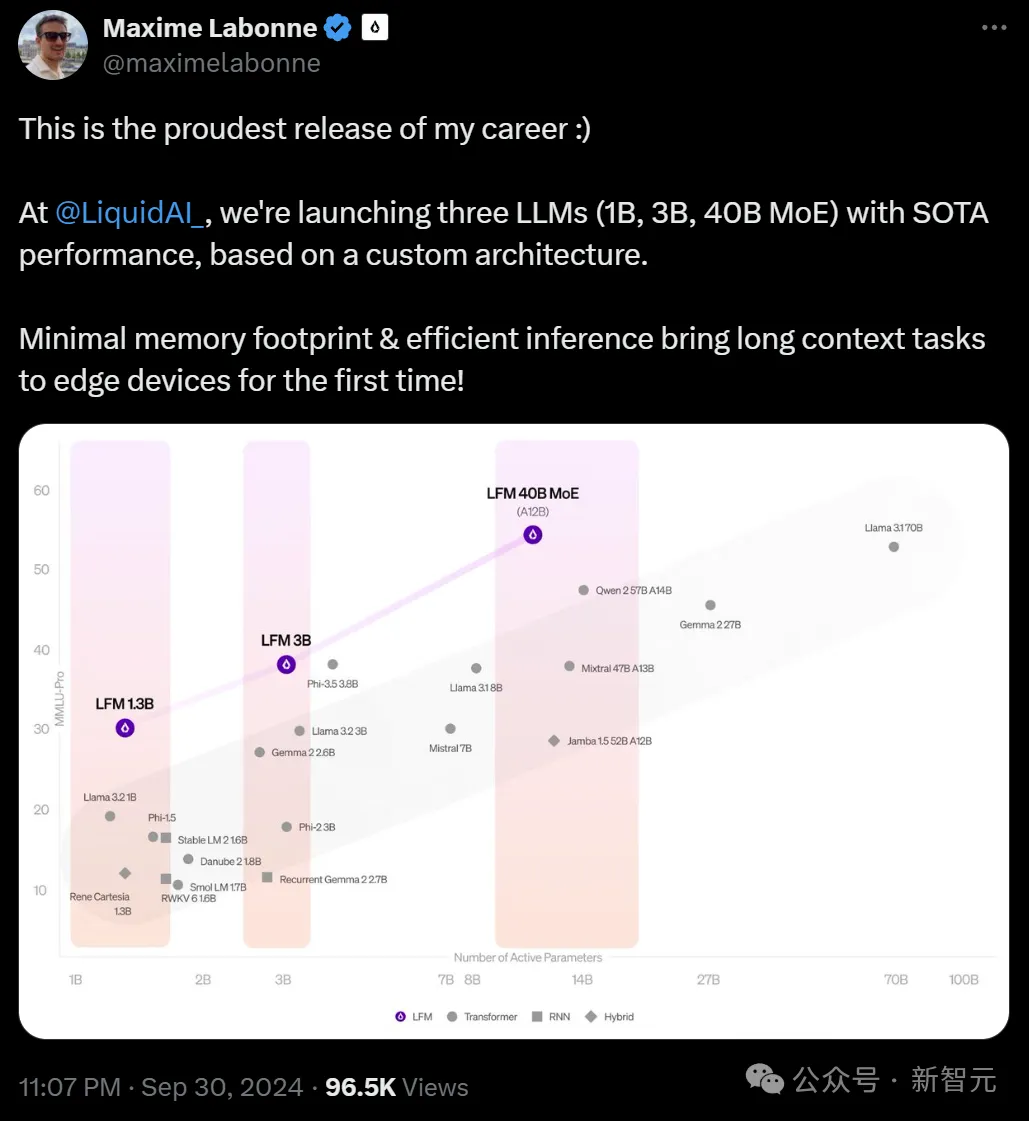
就在刚刚,MIT系初创公司Liquid AI团队官宣:推出首批多模态非Transformer模型——液体基础模型LFM。

近一个月来,全面对标 OpenAI 的智谱大小动作不断,GLM-4-Flash 免费,推出极致性价比的 FlashX,旗舰模型升级到 Plus 系列... 其中最为关注的就是 Plus 系列,模型性能越来越强的同时,价格也越来越低。
在机器人研究领域,抓取任务始终是机器人操作中的一个关键问题。这项任务的核心目标是控制机械手移动到合适位置,并完成对物体的抓取。近年来,基于学习的方法在提高对不同物体的抓取的泛化能力上取得了显著进展,但针对机械手本身,尤其是复杂的灵巧手(多指机械手)之间的泛化能力仍然缺乏深入研究。由于灵巧手在不同形态和几何结构上存在显著差异,抓取策略的跨手转移一直存在挑战。